本文主要是介绍实现AI角色的自主移动-靠近Seek行为,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
靠近(Seek)行为
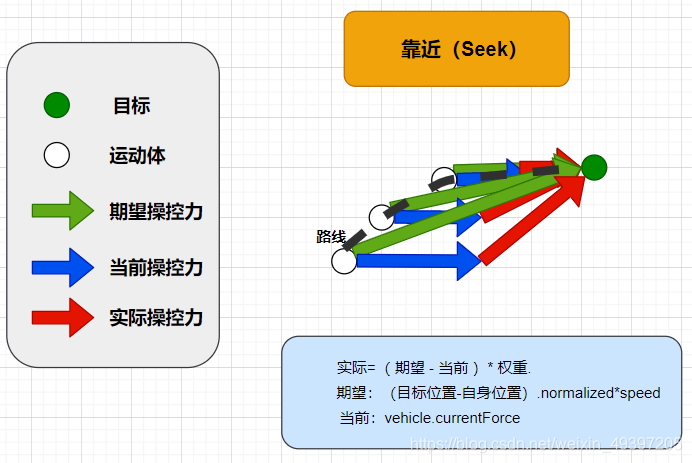
操控行为中的靠近是指,指定一个目标位置,根据当前的运动速度向量,返回一个操控AI角色到达该目标位置的“操控力”,使AI角色自动向该位置移动。
要想AI角色靠近目标,首先需要计算出AI角色在理想情况下到达目标的预期速度,该速度可以看作是从AI角色的当前位置到目标位置的向量。操控向量是预期速度与AI角色当前速度的差,该向量大小随着当前位置变化而变化,从而形成图中的靠近路线。
C#脚本代码
using UnityEngine;namespace AI.Steering
{/// <summary>/// 靠近/// </summary>public class SteeringForSeek:Steering{public override Vector3 GetForce(){if (target == null) return Vector3.zero;//当前 vehicle.currentForce//期望expectForce = (target.position - transform.position).normalized * speed;//实际 = (期望 - 当前) * 权重var realForce = (expectForce - vehicle.currentForce) * weight;return realForce;} }
}
测试:
- 创建一个Cube作为AI角色,创建一个Cylinder作为目标。
- 给Cube身上加入LocomotionController脚本和SteeringForSeek脚本。
- 把Cylinder拖给Cube的SteeringForSeek类上的Target手动赋值。
- 开始运行(可以在Scene面板调整Cylinder位置来观察Cube的行为)。
运行:
Cube逐渐向Cylinder靠近,当Cylinder移动Cube也转向移动。
注意: 由于操控行为是基于力和速度的,速度不会突变,因此,如果角色一直采取靠近行为,那么最终它将会从目标穿过,然后再返回重新接近目标,如此反复,这样产生的运动就像飞蛾绕着灯飞舞。
Unity3D游戏AI架构
这篇关于实现AI角色的自主移动-靠近Seek行为的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








