本文主要是介绍汽车标定技术(十七)--Bypass的前世今生,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1.Bypass的诞生
2.Bypass的发扬光大
2.1 基于XCP的Bypassing
2.2 基于Debug的Bypass
2.3 小结
3.Bypass的实际应用
1.Bypass的诞生
下图我相信只要用过INCA的朋友都非常熟悉。

这是远古时期(2000年左右?我猜)ETAS针对发动机控制参数标定设计的一种并行数据访问专利技术:ETK(德语: Emulatortastkopf)。
在当时做发动机控制参数标定,有两种技术:
- 基于CCP、K-Line的串行标定技术
这个没啥好说的,就是现在最常见XCP的前身。
- 基于ETK的并行访问技术
利用MCU内部数据地址总线实现高速并行访问,如下图:
ECU从WP或者RP获取数据,将数据写入DPRAM实现高速测量。

本来上面两种方式在不同的场景下均有用武之地,但是随着技术的发展,应用软件工程师提出了新的想法——想在现有ECU硬件上不通过重刷代码的方式验证优化后的算法,以加速开发,同时也避免了硬件接线、刷机上的磕磕绊绊。
从理论分析,其实这种是完全可以做到的,例如最初ECU Flash存储的算法为y=ax+b,但第二天我觉得这个算法不优雅,模型重新修改成了y=ax²+bx+c,那么只需要这个输入x能够传给模型,y不就出来了么?我还不用重新刷ECU,方便快捷。
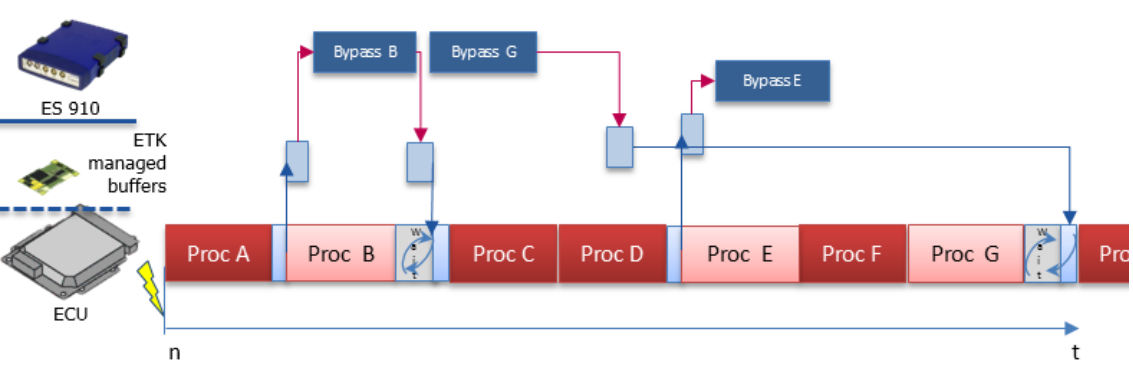
那么从基础软件角度如何来满足模型工程师的要求呢?很明显,如果有ETK技术支持,只要ECU把输入x以测量量(模型视角)写入到ETK RAM,模型开发工具(ASCET)去ETK拿数据计算并回写y,便可以验证模型算法的正确性,如下图:

这里就出现了Bypass的概念--即ECU中某些值不是通过ECU内部Flash代码计算得到,而是依赖外部传入。
2.Bypass的发扬光大
这个东西这么好用,肯定大家都想来尝尝鲜。
但是问题来,要用bypass就要用ETK,而ETK据说是ETAS的专利技术。这条路没法了,那联军们肯定不同意了,于是想了个法子,既然并行可以,串行标定也可以实现呢?不管什么方式,只要把输入给到上位机,输出给到ECU不就成啦。
2.1 基于XCP的Bypassing
于是CCP升级版--XCP提出了Bypassing的概念(不是bypass,注意用词,虽然我觉二者差不多)。如下:

理论上,ECU通过DAQ的方式把输入传个Bypassing工具进行计算,然后该工具通过STIM的方式传回给ECU,这样就和ETK Bypass一样一样的了。
不过考虑到总线传输的延时和一致性,XCP标准里还特意提出了 delayed bypassing,如下:

2.2 基于Debug的Bypass
理论上只要是可以向ECU写数据,ECU可以往外发数据的接口,应该都可以实现Bypass技术。
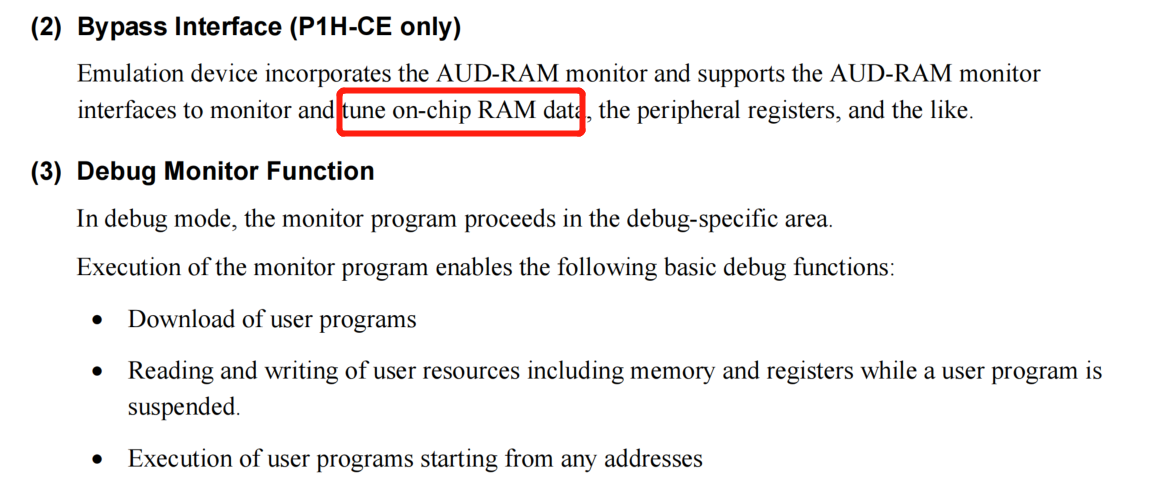
当ETAS遇到某些霸道芯片厂不肯暴露数据地址总线时,他们又想到了使用调试接口的Debug接口来实现bypassing。
我们看瑞萨RH850 P1x系列的ED设备就提供了Bypass接口:
我们从ETAS的针对PD和ED产品的串行ETK也可以看出端倪:


2.3 小结
基于上述描述,目前已知的bypass的实现途径主要有三种:
- 基于ETK技术
- 基于XCP协议栈
- 基于调试接口
3.Bypass的实际应用
那么Bypass到底会用在哪些地方呢?个人理解,只要是想在已验证过的ECU硬件上新增\优化应用层控制策略的地方 ,都可以使用Bypass。
Simulink使用XCP Master Block结合通信硬件即可实现bypassing:

Vector的CANape结合VN8900实现实时bypassing解决方案:

ETAS结合ES970提出的bypass方案:
这篇关于汽车标定技术(十七)--Bypass的前世今生的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!