本文主要是介绍Ubuntu16.04在ROS下使用iai_kinect2进行向相机标定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ubuntu16.04在ROS下使用iai_kinect2进行向相机标定
1.打印标定板
在下载的iai_kinect2在kinect2_calibration文件下是有标定模板的 你可以随意打印一个模板等着后期的标定使用
2.相机标定
启动kinect2_brige
rosrun kinect2_bridge kinect2_bridge _fps_limit:=2
若出现下面报错

解决方案:
//先打开ros
roscore
//再启动kinect2_brige
rosrun kinect2_bridge kinect2_bridge _fps_limit:=2
_fps_limit:=2设置相机每秒2帧进行采样。
启动时查看启动日志得到设备序列.
3.创建采样的文件夹
mkdir ~/kinect_cal_data
cd ~/kinect_cal_data
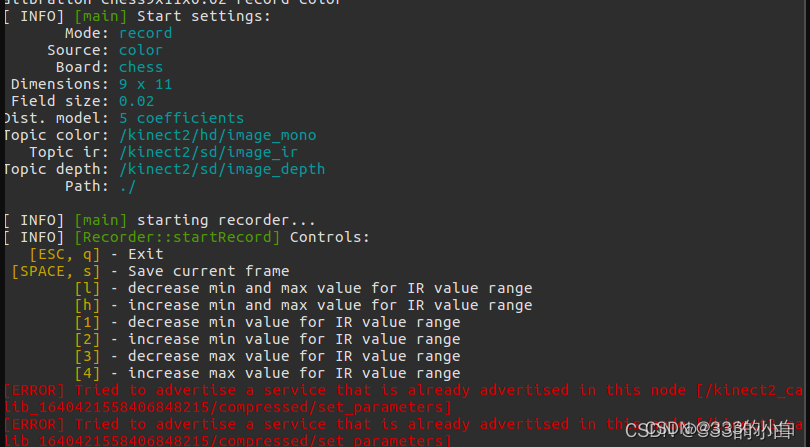
4.彩图采样
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record color
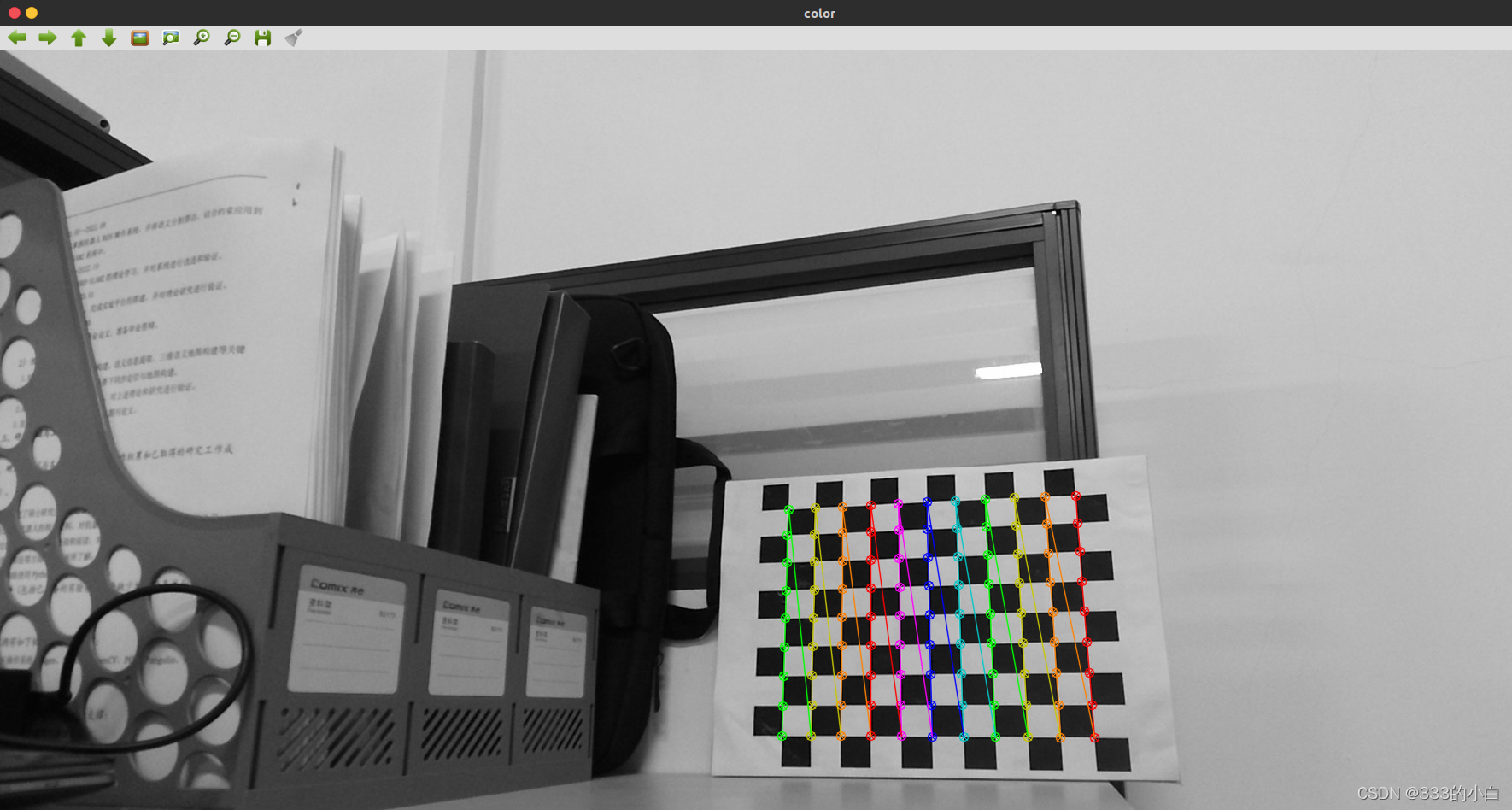
注:没有出现彩色角点的话,可能是chess9x11x0.02设置问题
宽和高要比实际的数小1
width为标定板宽度方向的标定点个数。
height为标定板高度方向的标定点个数。
size为标定方格的宽度,单位为米。
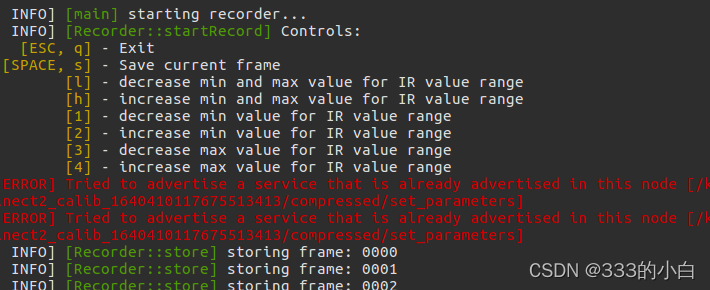
报一下错误(此错误可忽略)
报错可能原因:
image_view和kinect2_calibration发生了冲突
看到这个是不需要解决的,只是注意在每次采集棋盘格时,要等到kinect2检测到角点信息后,才可以按space和s键保存
5.详细介绍:
标定彩色摄像头
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record color//按几次空格键记录 鼠标放在相机窗口rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 calibrate color
//会生成calib_color.yaml 文件
标定红外:
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record ir
//按几次空格键记录
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 calibrate ir
//会生成calib_ir.yaml 文件
帧同步标定:
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record sync//按几次空格键记录
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 calibrate sync
//会生成calib_pose.yaml 文件
深度标定:
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 calibrate depth
//会生成calib_depth.yaml 文件
然后再把calib_color.yaml calib_ir.yaml calib_pose.yaml calib_depth.yaml拷贝到/home/robot/catkin_ws/src/iai_kinect2/kinect2_bridge/data/034011551247文件夹中
标定搞定。
运行
roslaunch kinect2_bridge kinect2_bridge.launch
rosrun kinect2_viewer kinect2_viewer
**
PS:运行orb_slam2制作kinect_qhd.yaml
**
参考博客:https://www.cnblogs.com/ysenuu/p/7113142.html
在输入命令:
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record color
后,弹出显示图像的窗口,在终端中显示信息:
Topic color: /kinect2/hd/image_mono
Topic ir: /kinect2/sd/image_ir
Topic depth: /kinect2/sd/image_depth
Path: ./
说明默认标定程序使用的彩色图像大小是hd(19201080),标定出的相机内参数矩阵只适合于19201080大小的图像。
为了使用Kinect v2采集的qhd(960540)、或sd(480270)的彩色图像,需要相应的标定出的相机内参。
修改文件
在 catkin_ws/src/iai_kinect2/kinect2_calibration/src 文件夹下找到:kinect2_calibration.cpp 文件。查看该文件中1311-1313这三行命令:
std::string topicColor = “/” + ns + K2_TOPIC_HD + K2_TOPIC_IMAGE_MONO;
std::string topicIr = “/” + ns + K2_TOPIC_SD + K2_TOPIC_IMAGE_IR;
std::string topicDepth = “/” + ns + K2_TOPIC_SD + K2_TOPIC_IMAGE_DEPTH;
对应**,因此把 K2_TOPIC_HD 改为 K2_TOPIC_QHD** 即可。保存。
然后重新编译:
cd ~/catkin_ws (进入自己路径下的catkin_ws文件夹)
catkin_make -DCMAKE_BUILD_TYPE=“Release”
rospack profile
再次运行
rosrun kinect2_calibration kinect2_calibration chess9x11x0.02 record color
则弹出来的窗口显示的是960*540的图像,其他亦同
官方教程:
https://github.com/code-iai/iai_kinect2/tree/master/kinect2_calibration#calibrating-the-kinect-one
参考博客:
https://blog.csdn.net/qingdu007/article/details/79204115
https://blog.csdn.net/wangjie0825/article/details/107889956
https://www.it610.com/article/1295042931962486784.htm
这篇关于Ubuntu16.04在ROS下使用iai_kinect2进行向相机标定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



