kinect2专题

Kinect2驱动切换
在开发中电脑上同时装了Kinect2官方驱动,如何来回切换,步骤如下: 从libfreenect2驱动切换到官方驱动: 1、打开设备管理器,找到libusbK USB Devices,右键点击 “Xbox NUI Sensor (Composite Parent)” 设备,并点击卸载,同时勾上卸载其软件驱动选项; .2、扫描检测硬件改动,然后打开官方demo验证即可; 从官方驱动切换到li

Kinect2性能参数
一、基本参数 RGB:1920 x 1080 @ 30 / 15 FPS(根据环境亮度) Depth:512 x 424 @ 30 FPS、16bit 距离值(mm)、可侦测范围0.5 ~ 4.5M 红外相机:512 x 484,30 Hz FOV: 70° x 60° 深度识别范围: 0.5–4.5 meters 1080p 彩色相机 30 Hz (弱光条件下为15 Hz) 二、标

kinect2用法实例学习笔记以及常识信息
kinect用法实例学习笔记 从关节获取数据C++环境配置joint orientation 从关节获取数据 读取骨骼数据,要 1、先通过IKinectSensor来取得 IBodyFrameSource, 2、开启 IBodyFrameReader,之后再在主循环里取得 IBodyFrame里面的数据,但是在IBodyFrame里面实际上包括了所有人的数据,需要通过GetAnd
ROS下Kinect2的驱动安装及简单应用
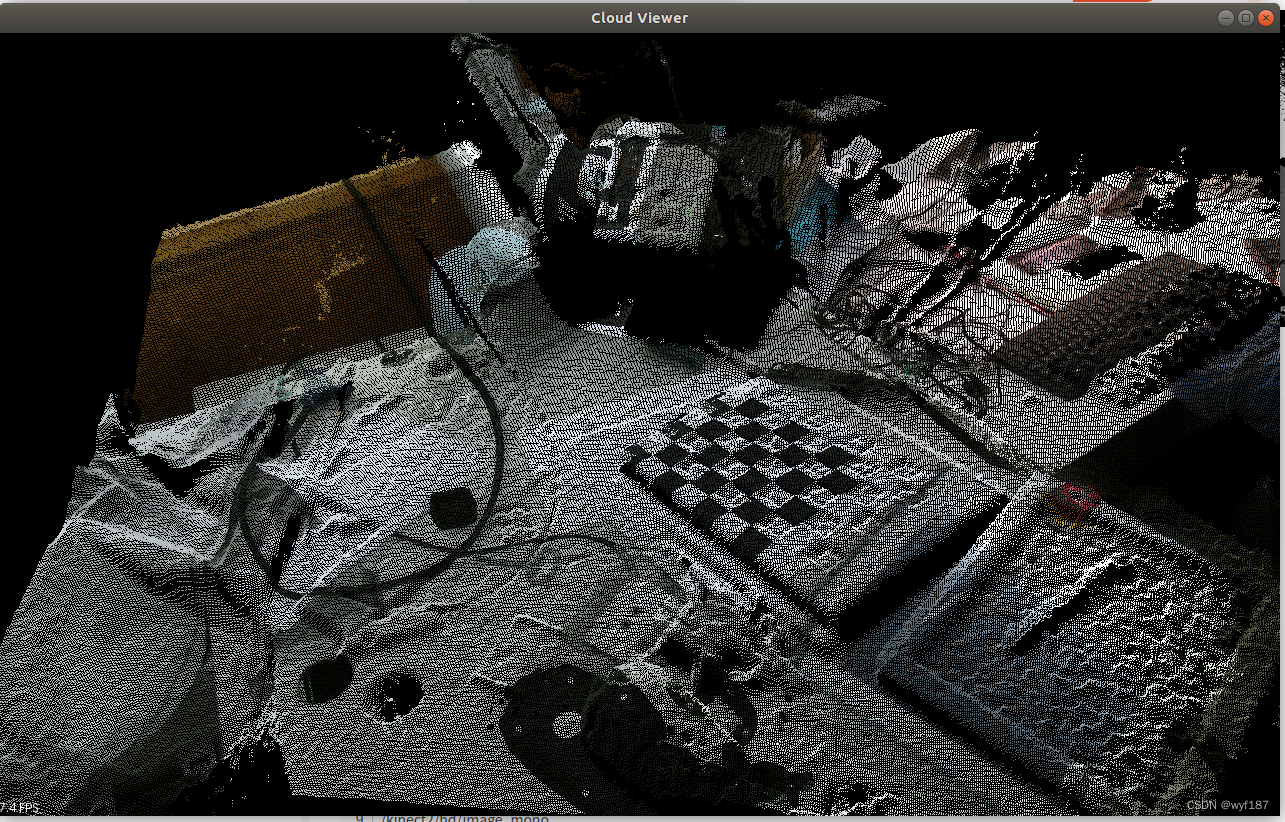
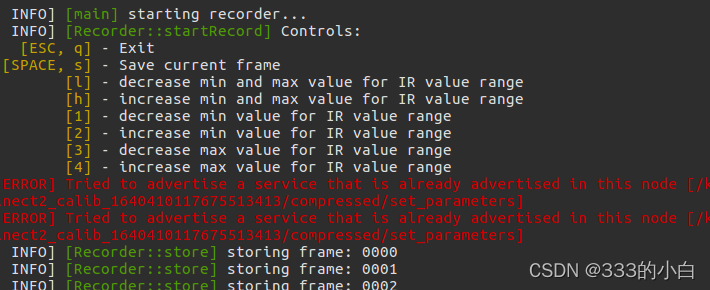
目录 目录Kinect2ROS驱动节点配置 libfreenect2iai-kinect2 简单运用 保存图片保存图片序列点击点云图获取坐标 Kinect2 相信对这个话题感兴趣的同学, 对Kinect2应该也是很熟悉的吧。 这个设备现在也不贵, 某东上面大概两千左右就能买到, 并且还能配置一个三脚架。 Kinect2的效果, 确实会比1代要好很多, 无论是骨骼点还是图像
Ubuntu 18.04 安装iai_kinect2遇到的问题
运行环境为:Ubuntu 18.04 Ros melodic 一、所需环境 libfreenect2,下载安装教程https://github.com/OpenKinect/libfreenect2 对于git clone因为网络问题用不了的同学,建议windows下载了以后把u盘拷进ubuntu系统。 二、安装libfreenect2 1. 下载u盘文件https://gith

iai_kinect2+Linux Mint 18.2安装踩坑记录
参考教程 https://github.com/code-iai/iai_kinect2 前面的工作 需要已经安装好ROS,教程可见 https://blog.csdn.net/yucong96/article/details/88865721 需要已经安装好freenect2,教程可见 https://github.com/OpenKinect/libfreenect2 激活ROS环境
Ubuntu16.04在ROS下使用iai_kinect2进行向相机标定
Ubuntu16.04在ROS下使用iai_kinect2进行向相机标定 1.打印标定板 在下载的iai_kinect2在kinect2_calibration文件下是有标定模板的 你可以随意打印一个模板等着后期的标定使用 2.相机标定 启动kinect2_brige rosrun kinect2_bridge kinect2_bridge _fps_limit:=2 若出现下面报错

Ubuntu16.04安装iai_kinect2爬坑记录
Ubuntu16.04安装iai_kinect2爬坑记录 安装iai_kinect2爬坑经共享 1. iai_kinect2下载安装 网上有很多的安装教程,将下载文件放入工作空间的src文件夹下。在src文件夹下打开终端输入命令 git clone https://github.com/code-iai/iai_kinect2.gitcd iai_kinect2rosdep insta

Ubuntu16.04、KinectV2、ROS(kinetic)接口iai_kinect2安装
写在最前面,本博客目的一是记录解BUG过程,二是希望自己以后有信心、耐心解决软硬件问题。 背景:一个月之前安装iai_kinect2运行正常,最近想读取点云数据,运行 roslaunch kinect2_bridge kinect2_bridge.launch 一直报错。 can't find compressed-image-transport.cmake
Ubuntu14.04安装MoveIt以及Kinect2驱动的问题
2019年1月15日更新:回头看这篇博客,写的比较乱、冗杂,所以,做了一些修改。 之所以写这篇博客,是因为我在这个上面浪费了两三天时间,算是总结出来一个比较正确的安装流程。 电脑配置:型号:ThinkPad E470,220G固态硬盘,8G内存,双显卡:Intel HD Graphics 620和NVIDIA GeForce 940MX。 系统:Win10与Ubuntu14.04双系统。关于

Kinect2性能参数
一、基本参数 RGB:1920 x 1080 @ 30 / 15 FPS(根据环境亮度) Depth:512 x 424 @ 30 FPS、16bit 距离值(mm)、可侦测范围0.5 ~ 4.5M 红外相机:512 x 484,30 Hz FOV: 70° x 60° 深度识别范围: 0.5–4.5 meters 1080p 彩色相机 30 Hz (弱光条件下为15 Hz) 二、标
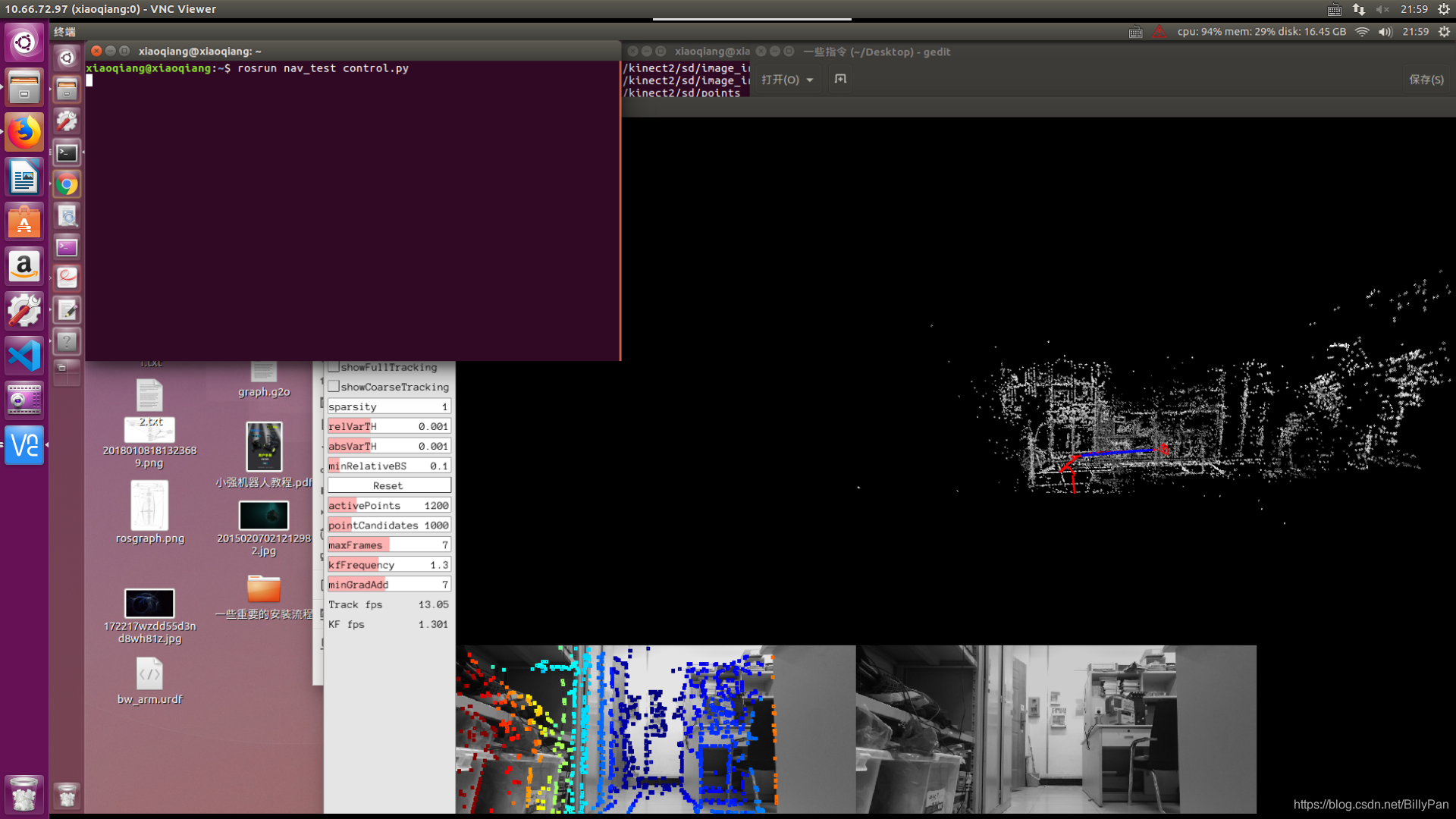
小强机器人运行DSO(小强PRO+Ubuntu16.04+Kinect2)
1.用DSO原因 之前做过RGBDslam但是发现生成的稠密地图效果很好,但是发现是没有轨迹的,导师在看了RGBDSLAM之后很想要得到轨迹的图片,但是我找了很多的SLAM框架比如ORBSLAM都发现没有轨迹,只保留了关键帧。前几个框架得到对轨迹图都是离线的,不是很符合期望。然后今天在网上看到里DSO,发现这个原本是单目对系统,并且之前有过了解,但没有跑过,并且也不知道原来这个框架是会显示轨迹,