本文主要是介绍iai_kinect2+Linux Mint 18.2安装踩坑记录,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参考教程
https://github.com/code-iai/iai_kinect2
前面的工作
需要已经安装好ROS,教程可见 https://blog.csdn.net/yucong96/article/details/88865721
需要已经安装好freenect2,教程可见 https://github.com/OpenKinect/libfreenect2
激活ROS环境
建立ROS工作环境
mkdir -p ./catkin_ws/src
cd catkin_ws
catkin_make
激活环境
source devel/setup.bash
若是zsh,则为
source devel/setup.zsh
下载iai_kinect2代码
cd catkin_ws/src
git clone https://github.com/code-iai/iai_kinect2.git
编译
cd iai_kinect2
rosdep install -r --from-paths .
cat ../../
catkin_make -DCMAKE_BUILD_TYPE="Release"
在第二步,会出现如下结果
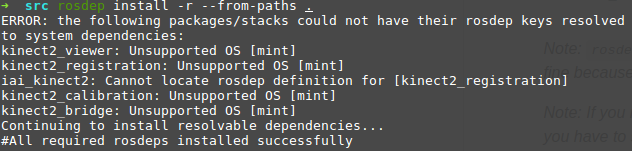
它说系统是Linux Mint sonya,这它不认识,它只运行在Linux Ubuntu xenial。但实际上sonya就是基于xenial上的,因此没有问题,只要把这一命令改成
rosdep install -r --from-paths . --os=ubuntu:xenial
就行了。参考教程 https://blog.csdn.net/luanfei3717/article/details/82217047 。这样运行之后,会出现
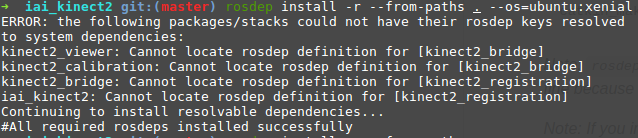
虽然仍然找不到kinect2_bridge,但由于kinect2_bridge已经包含在iai_kinect2上了,因此这不影响后续编译。参考教程https://github.com/code-iai/iai_kinect2/issues/296
第四步,编译出错,提示找不到vtkproj4

按照 https://github.com/PointCloudLibrary/pcl/issues/1594 ,将/usr/lib/x86_64-linux-gnu中的libvtkCommonCore-6.2.so软链接成即可libvtkproj4.so,即
ln -s /usr/lib/x86_64-linux-gnu/libvtkCommonCore-6.2.so /usr/lib/libvtkproj4.so
这样就能编译通过了。
测试
roslaunch kinect2_bridge kinect2_bridge.launch
另开一个命令行,注意激活环境,然后
rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud
可以看到结果,说明安装成功。
这篇关于iai_kinect2+Linux Mint 18.2安装踩坑记录的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









