本文主要是介绍小强机器人运行DSO(小强PRO+Ubuntu16.04+Kinect2),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.用DSO原因
之前做过RGBDslam但是发现生成的稠密地图效果很好,但是发现是没有轨迹的,导师在看了RGBDSLAM之后很想要得到轨迹的图片,但是我找了很多的SLAM框架比如ORBSLAM都发现没有轨迹,只保留了关键帧。前几个框架得到对轨迹图都是离线的,不是很符合期望。然后今天在网上看到里DSO,发现这个原本是单目对系统,并且之前有过了解,但没有跑过,并且也不知道原来这个框架是会显示轨迹,然后就试着跑。但是其中遇到一些问题,好在最后都成功解决。
2.安装流程
前人栽树后人乘凉,直接甩上我参考的链接(虽然有很多坑)
https://blog.csdn.net/tatianzhuanshi/article/details/54412392
3.遇到的问题
我发现按照上面的安装流程是无法出结果的(可能是脸黑?)
但是我发现遇到问题的并不是我一个人,在评论区也有人和我遇到同样的问题,但也没有说是如何解决的(陷入僵局)。
由于这个框架需要依赖的东西很多,比如需要有Pangolin,python2.7,Kinect2的驱动等等,任何一步都会出现问题。
(1)在最后编译catkin_make这一步,发现生成不了最后需要运行的dso_live文件,很是奇怪。
在确认前面的依赖项,包括原始对DSO没有错误,我就开始从dso_ros文件上找问题。我用普通的
catkin_make指令发现并没有什么用,编译的时候没有显示生成需要的dso_live文件。
通过比较我参考的链接和我的小强手册,我发现了问题所在。
参考git的dso_ros指令:git clone https://github.com/JakobEngel/dso_ros .git
小强git的dso_ros指令:git clone https://github.com/BlueWhaleRobot/dso_ros.git
抱着试一试的心态,用了小强的指令后我发现可以了,神奇,看来是原来链接的dso_ros文件失效了。还有现在发现ros里面文件多了之后发现catkin_make指令失效了,这时候就应该用我上一篇博文里的指定指令来编译
catkin_make -DCATKIN_WHITELIST_PACKAGE="文件名"
哈哈用多了这条指令,用起来轻车熟路了!
(2)然后我就开开心心跑去运行小车了,运行的命令是
rosrun dso_ros dso_live image:=/kinect2/qhd/image_color_rect calib=/home/xiaoqiang/dso_ros/camera.txt mode=1
发现还是不行啊,发现问题一直是(核心转储),报的错误是不能识别模式1也就是mode1是什么,这明明是固有的指令,晚上没识别不了呢?我按照步骤一步步下来,后来发现了问题所在。在执行指令之前,由于DSO原先是为了单目相机做的,所以相机的内参是需要更改的,然后kinect内参虽然每个都不一样,但是也有默认值(差不太多的值)。于是要更该写一个txt文件,问题就在于此。由于代码读取相机内参的时候是有严格的格式的。我仔细查看了我的txt文件,发现多了一个空格!!!!就是那个小小的空格!!!
敲代码真的需要心思缜密,小心翼翼啊!!!
4.结果
先上结果一张,用的是VNC远程控制机器人跑的实验室短短的一条路。
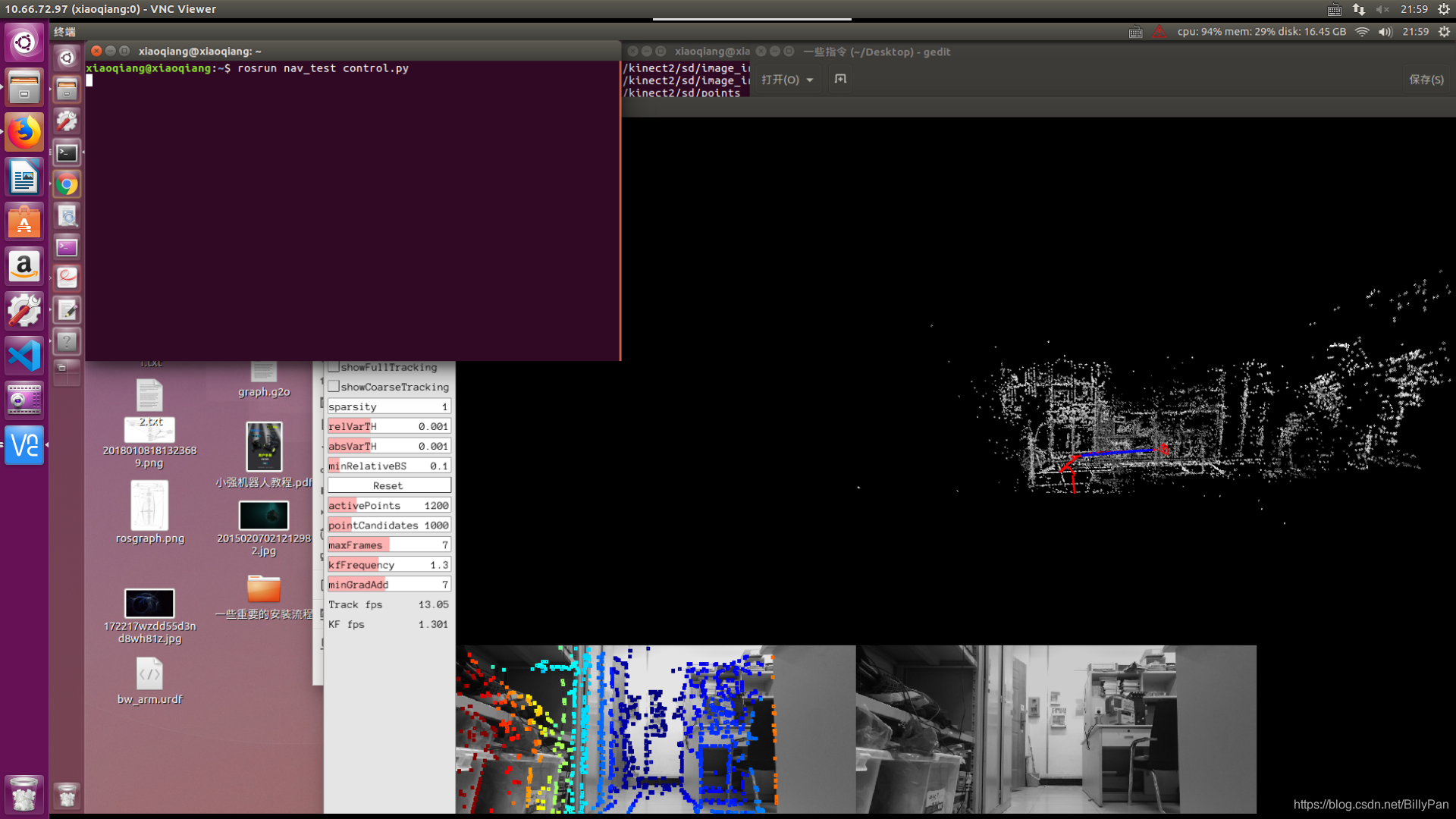
发现效果还是不错,但是DSO框架的初始化也太慢了吧,稀疏建图效果比起RGBDSLAM的彩色稠密建图差太多啦,但是速度快很多哈哈,也是很优秀的框架,接下来深入看看这个框架的论文和代码。
还是小白,继续加油学习!大佬多多交流!
这篇关于小强机器人运行DSO(小强PRO+Ubuntu16.04+Kinect2)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








