dso专题

DSO slam ros 模式
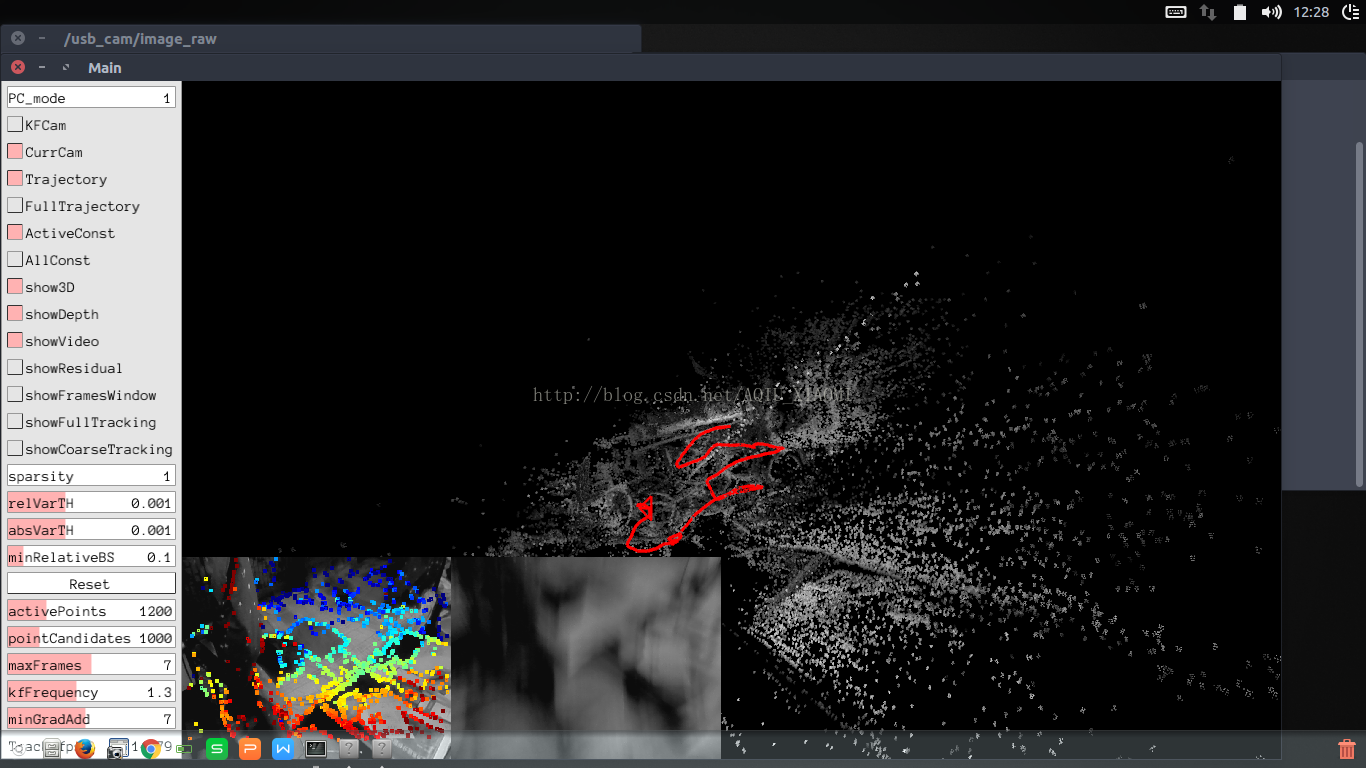
dso 直接法纯视觉定位,作者采用读取包的方式,数据使用存在不方便. 源码:https://github.com/JakobEngel/dso.git ros需要链接库版:https://github.com/JakobEngel/dso_ros.git 直接运行版:GitHub - jankinbyy/dso_ros_run 在config下修改相机内参. 结果:地图点密度较高,尺度存

理解BW DSO/Cube 增量/全量抽数
1.对于数据删除后,怎么抽数使得DSO/Cube实现数据同步? 首先需要说明的是:BW在处理删除没有优势,通过Delta或Full DTP都不能满足要求,目前有两种方法可以实现 第一种:从数据源上下手,增加一个删除标记,在报表展示的时候,filter删除的数据,使得不显示 第二种:伪增量,从Transformation入手,在开始例程中,比较上载的数据和已有数据,设置其指

kernel version 367.48. does not match DSO version 367.57
因为更新了ubuntu 软件运行tensorflow产生了:TensorFlow Session Error: kernel version 367.48. does not match DSO version 367.57.的错误,昨天还好好的。 原因是apt-get upgrade没有更新英伟达的驱动nvidia driver,导致驱动程序版本比DSO低(或者存在兼容性问题?未知)

两步成功实现在stereo-dso上运行kitti数据集
1. 双目DSO运行kitti数据集效果图 首先上图,图1是双目DSO在kitti的运行动图,下文将对如何实现双目DSO在kitti上运行进行详细介绍。有关双目DSO如何在ubuntu系统下安装请参看这里。 2. 运行KITTI 第一步,创建一个txt文件,将其命名为kitti.txt,将其保存在双目DSO目录文件夹下。在kitti.txt内写入以下内容: Pinhole 7.18856
仪器保养 | 安捷伦DSO-X 2002A示波器自检测/自校准
安捷伦DSO-X 2002A示波器自检测、自校准 首先上电开机 1. 按下Utility-服务-Diagnostics-硬件本机自检-前面板自检 2. 按下Utility-服务-Calibration--按下后盖CAL-开始用户校准-根据提示完成操作 感兴趣的话就跟安迪一起来学习吧~ 仪器保养 | 安捷伦DSO-X 2002A示波器自检测/自校准
实验笔记之——bug:in /usr/local/lib/libfmt.a(format.cc.o) is referenced by DSO
最近在编译D-MAP的时候遇到下面的问题 在github issue好像也有类似的提问 compiling error with fmt · Issue #4 · hku-mars/D-Map · GitHub 这应该是fmt配置没有连接上。为此寻找所有包含的fmt文件,在头文件处加入 #define FMT_HEADER_ONLY#include "fmt/format.h"

廉价DSO Hantek 6022BL说明书上没有的内容
刚刚入手一台国产的廉价的 DSO:Hantek 6022BL,怎奈官方文档“少的可以”,不得不拿起搜索引擎查阅其他用户的使用经验。整理/翻译在这里,备忘。 1.主面板前面的H/P按钮到底是干什么用的 参考页面: http://www.eevblog.com/forum/testgear/hantek-6022be-20mhz-usb-dso/ 官方说明书中只用2处提到了这
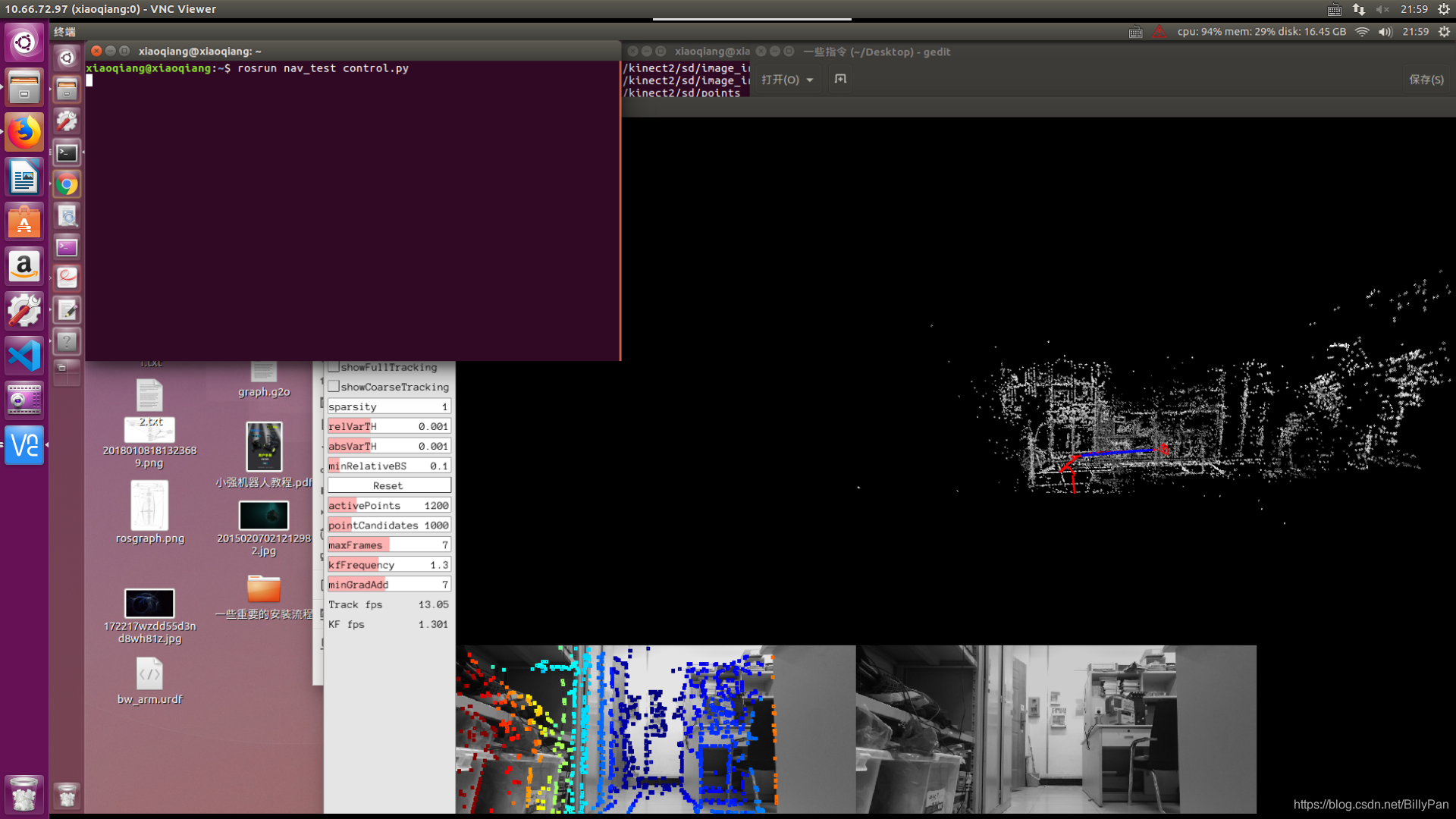
小强机器人运行DSO(小强PRO+Ubuntu16.04+Kinect2)
1.用DSO原因 之前做过RGBDslam但是发现生成的稠密地图效果很好,但是发现是没有轨迹的,导师在看了RGBDSLAM之后很想要得到轨迹的图片,但是我找了很多的SLAM框架比如ORBSLAM都发现没有轨迹,只保留了关键帧。前几个框架得到对轨迹图都是离线的,不是很符合期望。然后今天在网上看到里DSO,发现这个原本是单目对系统,并且之前有过了解,但没有跑过,并且也不知道原来这个框架是会显示轨迹,
defcon-quals 2023 crackme.tscript.dso wp
将dso文件放到data/ExampleModule目录下,编辑ExampleModule.tscript文件 function ExampleModule::onCreate(%this) { trace(true); exec("./crackme"); __main("aaaaaaaa"); quit(); } 然后点击主目录下的Torque3D-debug.bat就可以在生成的cons