本文主要是介绍如何提步进电机高精度,降低噪音和共振?(TMC),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
以下这个方法特别适合用于 PM 电机或者大力矩的步进电机优化微步波形效果,因为这些电机的制造这些电机的电机制造商通常无法实现对正弦波的良好适应,因为他们必须优化极靴以获得高扭矩,或者易于制造。
采取TMC开发板来调试
有噪音或者共振或者震动就可以调整 波形不好的话就可以使用该工具来调整微步波形表。
这个工具的作用是在低速情况下它有助于更精确控制微步,降低运行噪音,减少电机的共振和震动。不适合高速。
方法:
• 微步细分表 MSLUT
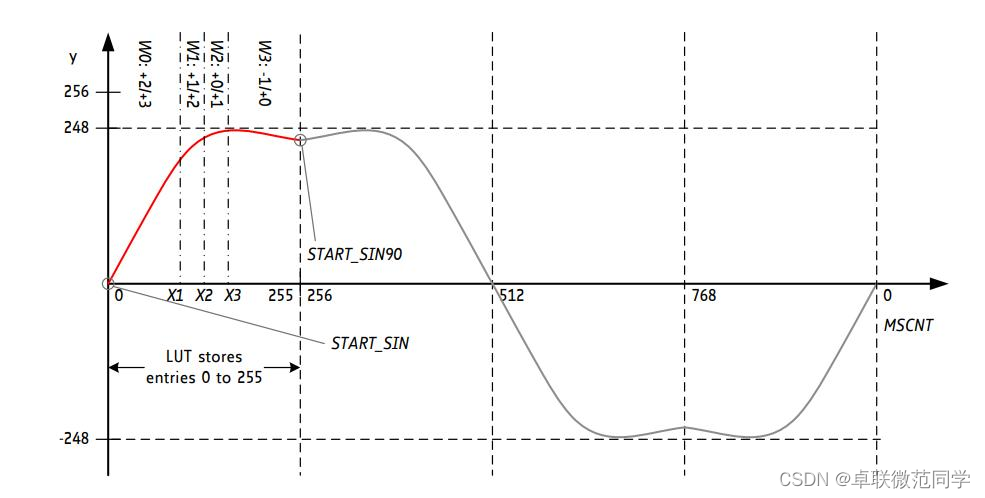
为了最大限度地减少所需的内存和要编程的数据量,只存储了四分之一的波形。内部微步表从0°到90°它
对称地延伸到360°。读出表格时,10 位微步计数器MSCNT 呈现了完全扩展的微步表。该表以增量方式存储,
使用每个条目各一位。因此,只需要 256 位(ofs00 到 ofs255)来存储四分之一波形。这些位映射到八个 32
位寄存器。每个ofs位控制在表中前进一个步骤时添加一个倾斜度 Wx 或 Wx+1。当 Wx 为 0 时,表中实际微步
位置的 1 位表示在前进到下一个微步时“添加一”。由于波的倾角可以高于1,因此可以使用四分之一波内最
多四个灵活的可编程段将基本倾角Wx编程为-1,0,1或2。这样即使是负方向的倾斜度是可以实现的。四个倾
角段由位置寄存器 X1 至 X3 控制。倾角段0从微步位置0到X1-1,其倾角由W0控制,段1从X1到X2-1,其倾角
由W1控制,依此类推。修改微步时,必须注意确保平滑对称的零跃迁当四分之一波扩展到全波时。波的最大
产生的摆动应调整到-248至248的范围,以提供最佳的分辨率,同时为基于迟滞的斩波器留出余量以增加偏移。
当微步发生器在微步表内推进时,它使用每个微步计算电机线圈的实际电流值,并将其存储到寄存器CUR_A和
CUR_B。但是,增量编码需要绝对初始化,特别是当微步表被修改时。因此,每当 MSCNT 通过零时,CUR_A
和CUR_B都会初始化
两个寄存器控制表的起始值:
- 由于零处的起始值不一定是0(可能是1或2),因此可以将其编程到起点寄存器START_SIN。
- 同样,第二波电机线圈的第二波开始需要存储在START_SIN90中。该寄存器存储2相电机相移为90°的波形
值。
提示:默认的参数可以适应大多数电机应用,TMC5160-EVAL带有一个软件工具可以来配置微步表
这篇关于如何提步进电机高精度,降低噪音和共振?(TMC)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!