本文主要是介绍图像降噪:Zero-shot Blind Image Denoising via Implicit Neural Representations,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- Zero-shot Blind Image Denoising via Implicit Neural Representations
- 1.作者首先指出 blind-spot denoising 策略的缺点
- 2.Implicit Neural Representations
- 2.1 策略一:early stopping 标准
- 2.2 策略二:Selective Weight Decay
Zero-shot Blind Image Denoising via Implicit Neural Representations
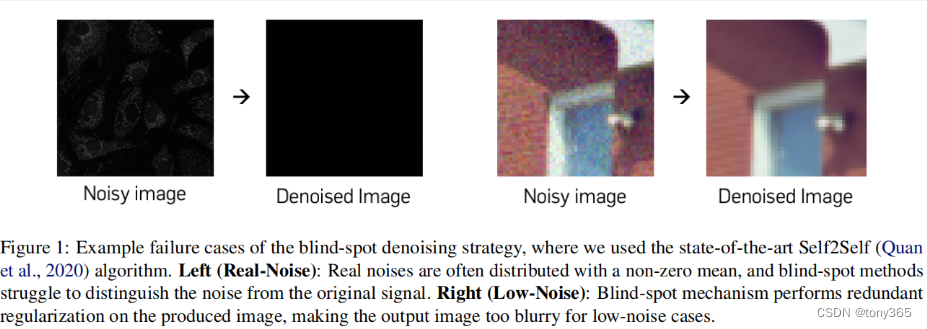
1.作者首先指出 blind-spot denoising 策略的缺点
在遇到噪声比较小的图像或者真实场景的图像容易失效,比如变模糊。
2.Implicit Neural Representations
INR(隐式神经表示)可以建立坐标到像素值的映射关系。之前的文章有介绍过。
INR也是一个深度学习网络,卷积或者全连接。输入是图像的坐标,输出是像素值,然后这个网络就是这个图像的一个表示。说白了就是拟合。
然后作者发现,拟合一个有噪声的图像,在前期会有一个阶段拟合的结果与 无噪声图像接近,然后最后训练完成与噪声图像接近。如下图a, 下图a还可以看出 在INR output与 clean最接近的时候,与 noisy的psnr 变化也更加平台。
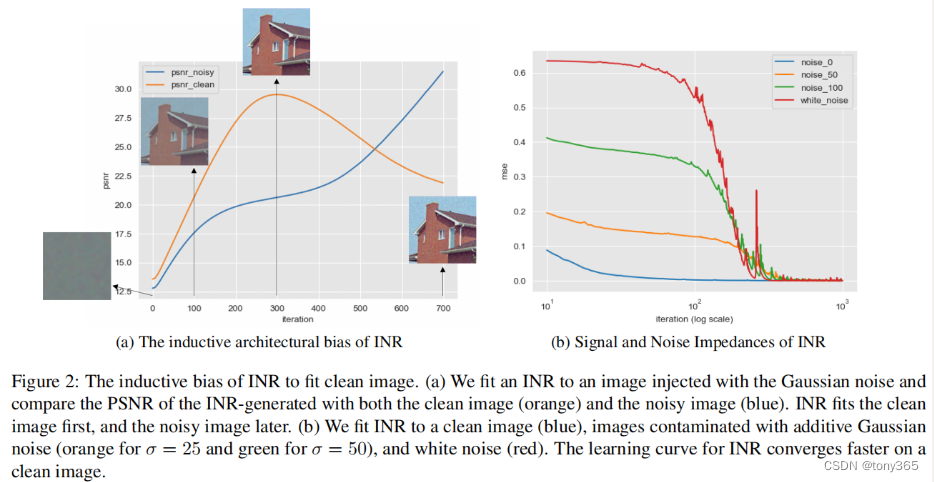
图b说明 拟合clean image 速度更快。
那么既然INR拟合一个有噪声的图像,在前期会有一个阶段拟合的结果与 无噪声图像接近,那么是不是在这个时候让网络停止训练就可以了。如何确定这个停止训练的时机呢?
2.1 策略一:early stopping 标准
作者指定的策略是这样的:
当 output 和 noisy 的mse小于等于 估计的noise level,则停止。
noise level 估计,作者利用的是Chen, G., Zhu, F., and Heng, P. A. An efficient statistical method for image noise level estimation.(ICCV), 2015.
2.2 策略二:Selective Weight Decay
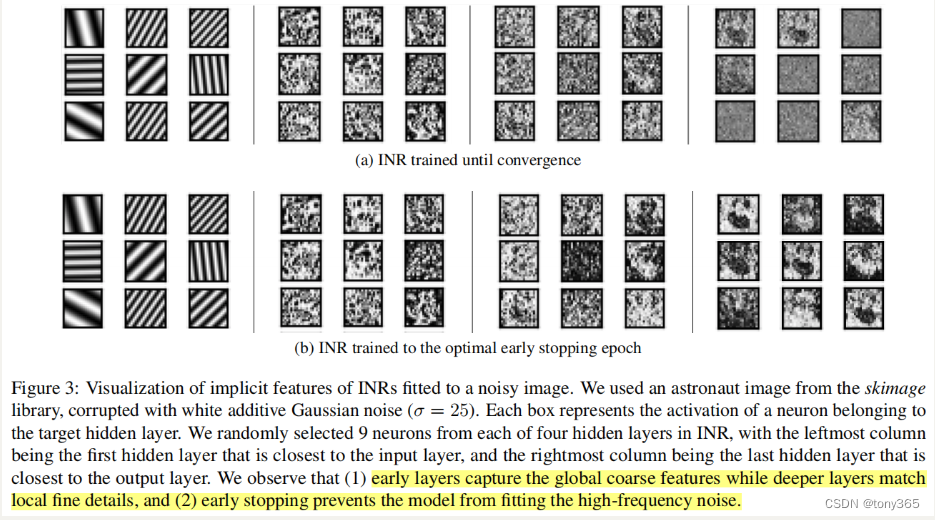
作者发现INR的前几层网络 主要学习 图像基础和低频信息,后面的layer主要学习更多细节和高频信息。并通过实验证实了这一点。
而且实验还表明 early stopping和 训练直到收敛 这2种方法得到的feature主要在后面的layer表现处更大差异。
因此作者提出的策略是:
we propose to apply weight decay selectively on the last two layers of INR. The main motivation comes from our observation that the atter INR layers contribute more to fitting the noise signal than earlier layers.
就是对后面2层 的weight 的更新不那么快。和前面的做一些平均。
额外话:
比如下面的类,可以对model的所有层的layer 进行 weight decay. 类似加权平滑操作。
class EMA():def __init__(self, model, decay):self.model = modelself.decay = decayself.shadow = {}self.backup = {}def register(self):for name, param in self.model.named_parameters():if param.requires_grad:self.shadow[name] = param.data.clone()def update(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.shadownew_average = (1.0 - self.decay) * param.data + self.decay * self.shadow[name]self.shadow[name] = new_average.clone()def apply_shadow(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.shadowself.backup[name] = param.dataparam.data = self.shadow[name]def restore(self):for name, param in self.model.named_parameters():if param.requires_grad:assert name in self.backupparam.data = self.backup[name]self.backup = {}
这篇关于图像降噪:Zero-shot Blind Image Denoising via Implicit Neural Representations的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







