本文主要是介绍目标检测“Object Detection Using Generalization and Efficiency Balanced Co-occurrence Features”,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ICCV15的文章,内容比较简单,但是boosting的方法,文章使用了Haar,HOG,LPB的共生特征,训练boosting时考虑了泛化和检测率平衡,让强特征在有高检测率的同时有好的推广性能。
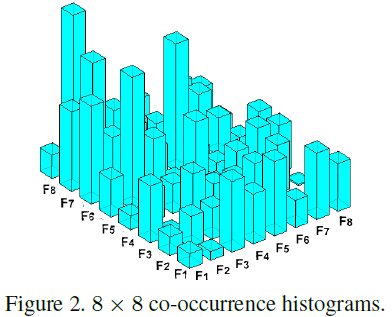
特征的描述比较简单,这里使用了灰度共生矩阵的描述方法,将特征用共生的方法描述,即:

形式如下图所示:
泛化和检测平衡
好的特征对应低的分类错误率,即:
使用共生特征,离得远的图像对有可能带来噪声,使用该项评价泛化能力:
将泛化损失引入目标函数:

再考虑计算时间,这主要由负样本决定,也即是每步的虚警数决定:
最后将计算时间引入损失函数:

对最终的损失函数解释如下,在RealAdaBoost的开始阶段,虚警较多,目标易与背景分开,倾向于使用高效的特征。在接下来的阶段,虚警变困难,要使用复杂的特征,其计算时间比较长。
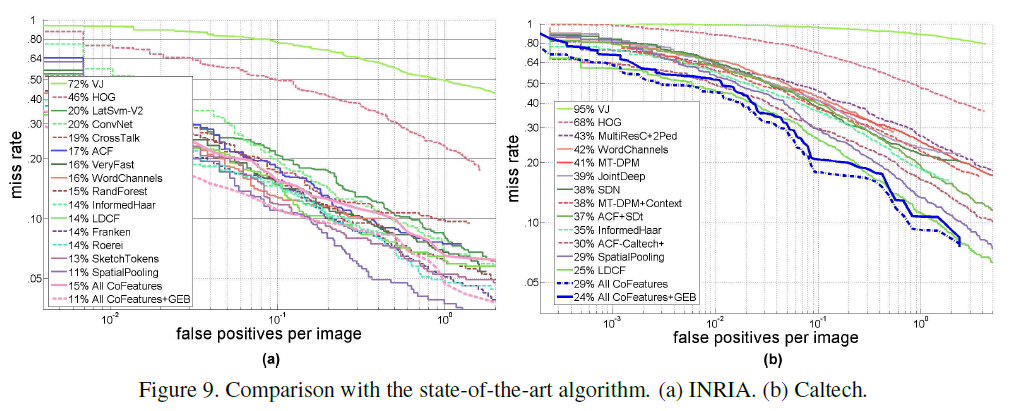
实验结果
在两个行人数据库上与其他方法结果对比:
这篇关于目标检测“Object Detection Using Generalization and Efficiency Balanced Co-occurrence Features”的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







