本文主要是介绍海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(3),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
经过调试后中终于在hi3519dv500和hi3516dv500两个平台中都实现的算法验证。同时可以做自己定制的算法模型的移植了,下面是两个移植案例效果。

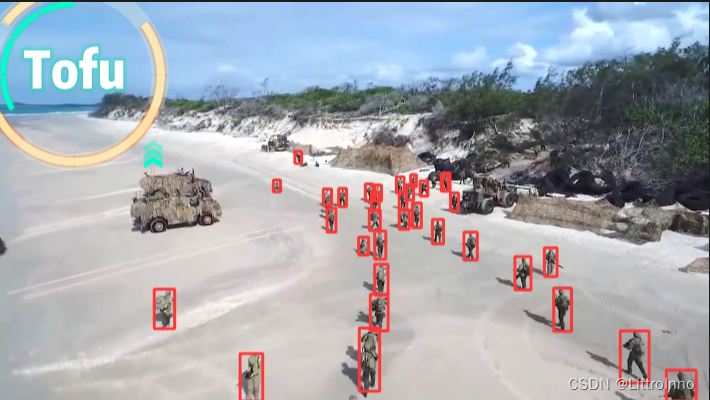
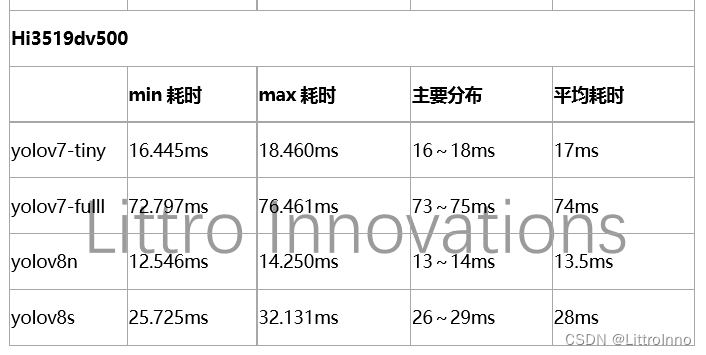
识别运行时间上做了对比和统计,具体的可以看下面的表格。
总体来说速度还是比较快的,Yolo系列算法实时运行是几乎没有任何问题。
训练到量化过程已经全部验证完,期待在项目中使用。

涉及到技术细节的部分因为商业用途,有部分省略。如需相关技术服务项目合作可私信联系。
-------------------------------广告分割线-----------------------------
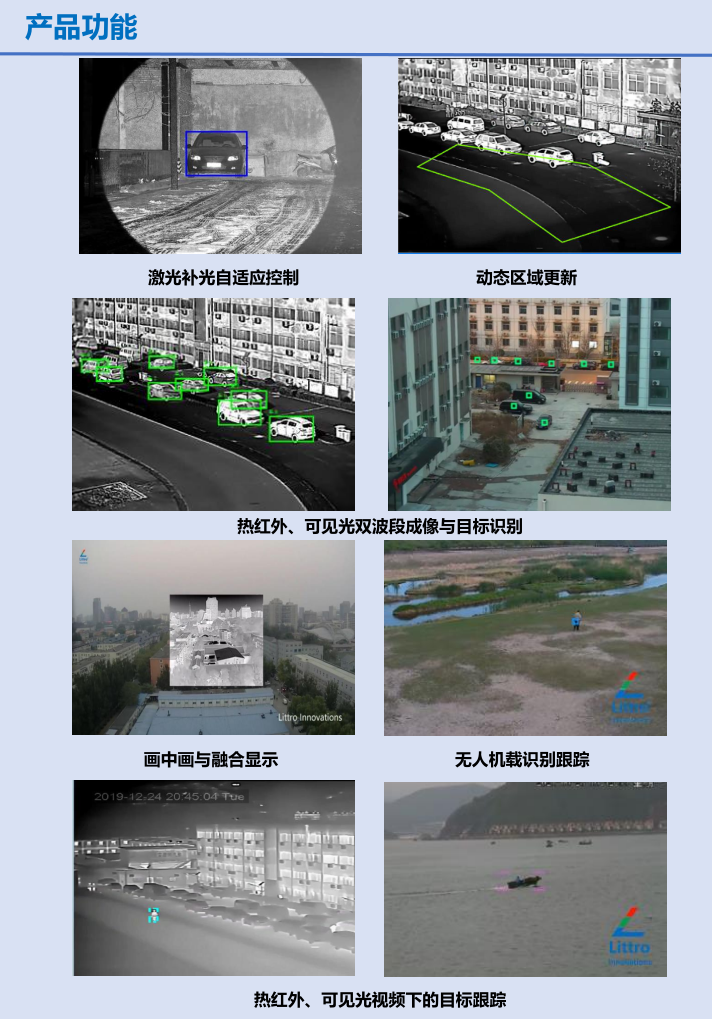
我司推出的目标识别跟踪模块,支持热红外、可见光主流多光谱视频输入与目标识别跟踪等功能,支持人、车、船、飞机、无人机等目标的实时识别与多模式跟踪,跟踪过程中支持镜头自动变倍、伺服随动。支持整机产品的定制。如有需求请私信联系。
www.littroinno.com




算法应用视频—— 无人机识别跟踪
=======================未经作者许可严禁转载===================================
这篇关于海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(3)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








