hi3516dv500专题

海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(18)-Yolov8改进
yolov8进行二次改进后进行了量化和速度测试 ,没有明显速度增加。对比一下模型的性能。 分别用原始模型和改后的模型进行了100 epochs训练。 以下是原始模型的结果。 class P R map@0.5 map@.95 1 0.79 0.49 0.571 0.316 2 0.851 0.738 0.801 0.538 改进后的模型结果。 cla
Hi3516DV500+SC2210 AIISP 黑光相机
1. Hi3516DV500 Hi3516DV500是一颗面向行业市场推出的高清智能网络摄像头SoC。该芯片最高支持2路sensor输入,支持最高5M@30fps的ISP图像处理能力,支持2F WDR、多级降噪、六轴防抖、多光谱融合等多种传统图像增强和处理算法,支持通过AI算法对输入图像进行实时降躁等处理,为用户提供了卓越的图像处理能力。支持热红外、结构光和ToF sensor的接入和处理。 H

海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(7)
上一篇用MindStudio转换完om模型,就可以在板卡里进行推理验证了。 SDK里有相关推理的demo,只要om模型转换没有遇到问题,是可以做推理验证。 首先SDK里推理验证方式有两种,一个是用H264实时视频流的方式,还有一种是通过图片的方式。 H264方式需要准备好FFMPEG,通过本地视频转换成H264视频流推给板卡。用下面指令就可以。 ffmpeg的安装使用就不在这里介

海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(3)
经过调试后中终于在hi3519dv500和hi3516dv500两个平台中都实现的算法验证。同时可以做自己定制的算法模型的移植了,下面是两个移植案例效果。 识别运行时间上做了对比和统计,具体的可以看下面的表格。 总体来说速度还是比较快的,Yolo系列算法实时运行是几乎没有任何问题。 训练到量化过程已经全部验证完,期待在项目中使用。 涉及到技术细
海思SD3403,SS928/926,hi3519dv500,hi3516dv500移植yolov7,yolov8(2)
本篇是在海思嵌入式芯片中移植yolov7和yolov8的第二篇。做一个调试的小总结。 目前手上有SS928还有Hi3516dv500两个板子,3519DV500板子还没开始调。Hi3519dv500和3516是同一套SDK,基本上是一样的,算力稍高一点,ARM主频高一点。 我们主要对yolov7和yolov8进行了从训练到量化,部署的工作。训练之前要改一下训练源码,
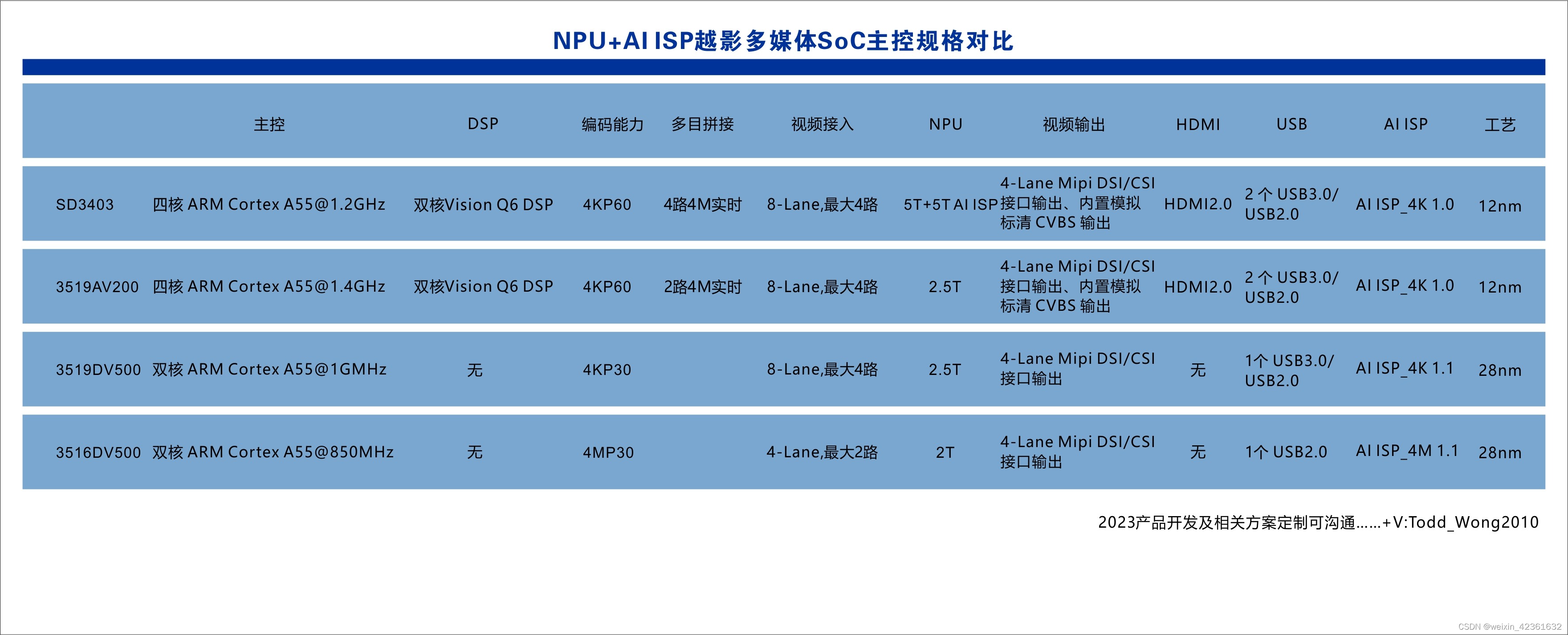
【越影升级】AI优化ISP,Hi3516DV500升级替代Hi3516DV300多媒体SoC平台方案
鉴于越来越多的用户关注到超感光视频采集方案的开发,海思2023年推出了一整套带AI ISP的多媒体平台方案; 其中Hi3516DV500芯片最高支持2路sensor输入,支持最高5M@30fps的ISP图像处理能力,支持2F WDR、多级降噪、六轴防抖、多光谱融合等多种传统图像增强和处理算法,支持通过AI算法对输入图像进行实时降躁等处理,为用户提供了卓越的图像处理能力。支持热红外、结构光和ToF

Hi3516DV500 SVP_NNN添加opencv库记录
默认没有带opencv库,但是实际项目中需要用到opencv库,因此添加一下此库; 1:编译opencv源码,这里具体可以参考 海思Hi3516移植opencv以及错误调试_海思hi3516摄像头开发-CSDN博客 2:在工程的根目录下新建一个3rdparty文件用于存放第三方的库,将编译安装好的库拷贝至3rdparty下并命名为opencv 3:修改src下的CMakeLists.txt