本文主要是介绍Hi3516DV500+SC2210 AIISP 黑光相机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. Hi3516DV500
Hi3516DV500是一颗面向行业市场推出的高清智能网络摄像头SoC。该芯片最高支持2路sensor输入,支持最高5M@30fps的ISP图像处理能力,支持2F WDR、多级降噪、六轴防抖、多光谱融合等多种传统图像增强和处理算法,支持通过AI算法对输入图像进行实时降躁等处理,为用户提供了卓越的图像处理能力。支持热红外、结构光和ToF sensor的接入和处理。
Hi3516DV500内置双核A55,提供高效、丰富和灵活的CPU资源,以满足客户计算和控制需求。Hi3516DV500集成了高效的神经网络推理引擎,最高2Tops NN算力,支持业界主流的神经网络框架。
支持图像 AI ISP 处理
2. SC2210
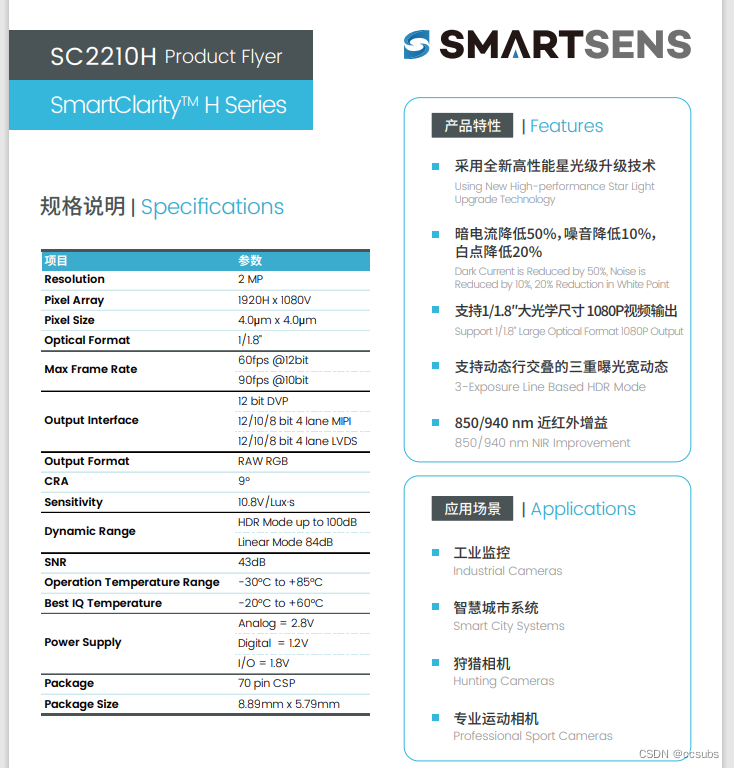
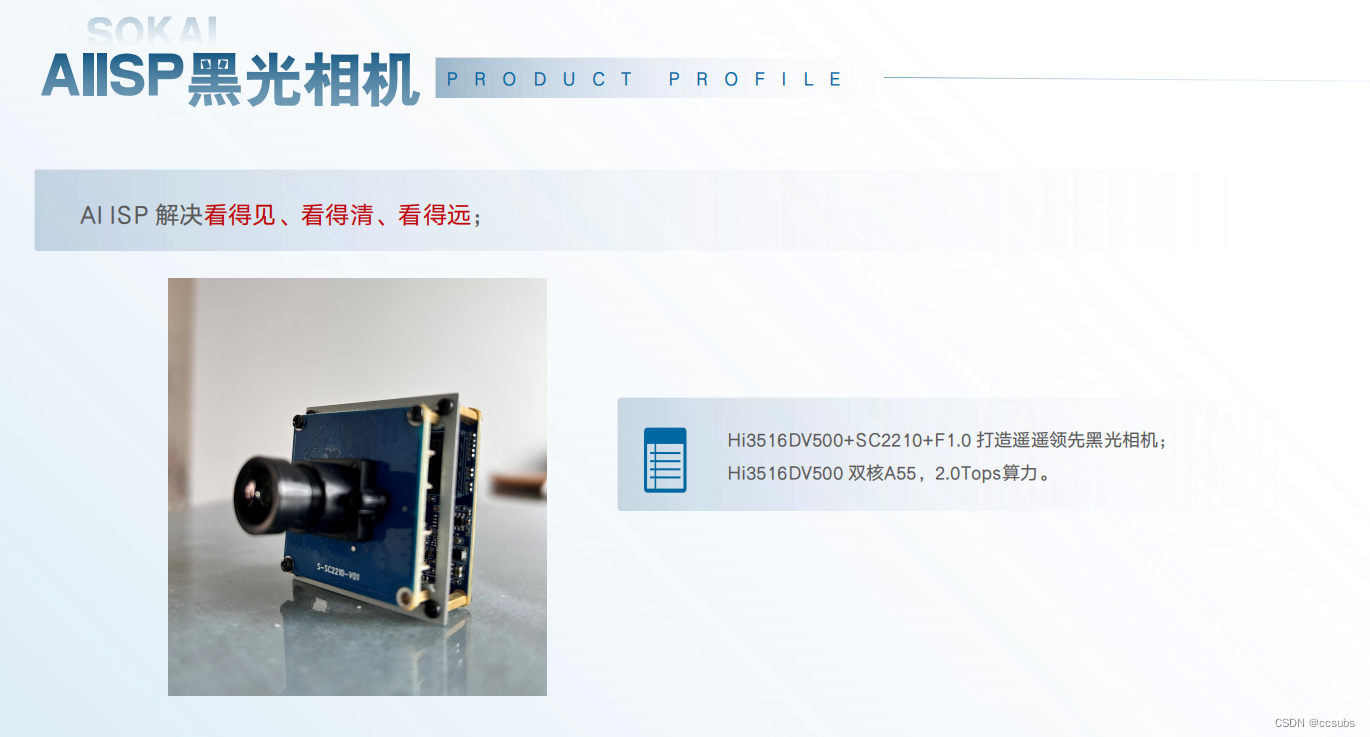
3.遥遥领先黑光相机
这篇关于Hi3516DV500+SC2210 AIISP 黑光相机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









