本文主要是介绍ros2/ros 4轮2驱机器人xacro/urdf文件示例代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这个实验中最重要的是:colcon build 之后要记得source install/setup.bash.否则修改的文件是不会更新的。知道了吧

<robot name="half" xmlns:xacro="http://wiki.ros.org/wiki/xacro"><xacro:property name="PI" value="3.1415926"/><!--定义一个变量PI,后边用来调用的--><xacro:property name="base_footprint_radius" value="0.001"/><xacro:property name="base_radius" value="0.1"/><xacro:property name="base_length" value="0.08"/><xacro:property name="ground_clearance" value="0.015"/><material name="black"><color rgba="0.3 0.3 0.0 0.5"/></material> <!--注意了这个不能少--><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}"/></geometry></visual></link><link name="base"><visual><geometry><cylinder radius="${base_radius}" length="${base_length}"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="yellow"><color rgba="0.3 0.3 0.0 0.5"/></material></visual></link><joint name="base2base_footprint" type="fixed"><parent link="base_footprint"/><child link="base"/><origin xyz="0 0 ${ground_clearance+base_length/2}"/></joint><xacro:property name="wheel_radius" value="0.0325"/><xacro:property name="wheel_length" value="0.015"/><xacro:macro name="add_wheel" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI/2} 0 0"/><material name="black"/></visual></link><joint name="${name}_wheel2base" type="continuous"><parent link="base"/><child link="${name}_wheel"/><origin xyz="0 ${flag*base_radius} ${-(ground_clearance+base_length/2-wheel_radius)}"/><axis xyz="0 1 0"/></joint></xacro:macro><xacro:add_wheel name="left" flag="1"/><xacro:add_wheel name="right" flag="-1"/><xacro:property name="support_wheel_radius" value="0.0075"></xacro:property><xacro:macro name="add_support_wheel" params="name flag"><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}"/></geometry><origin xyz="0 0 0" rpy="0.0 0.0 0.0"/><material name="black"></material></visual></link><joint name="${name}_wheel2base" type="continuous"><parent link="base"/><child link="${name}_wheel"/><origin xyz="${flag*(base_radius-support_wheel_radius)} 0 ${-(base_length/2+ground_clearance/2)}"/><axis xyz="1 1 1"/></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1"/><xacro:add_support_wheel name="back" flag="-1"/>
</robot> 上述代码中的:<material name="black">
<color rgba="0.3 0.3 0.0 0.5"/>
</material>
这段代码不能少,(虽然说少了也可以,但是不正常了)
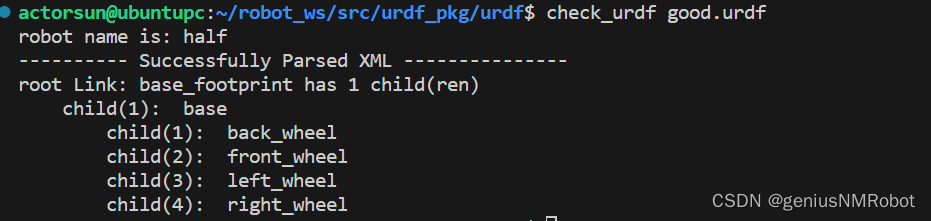
不少之后没有任何错误,说明符合urdf文件,xacro文件规范。
这篇关于ros2/ros 4轮2驱机器人xacro/urdf文件示例代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






