xacro专题

urdf ( xacro ) 的 collision碰撞参数设置
目录 写在前面的话整体流程1 URDF 文件结构2 查看原始碰撞形状描述3 加入简单碰撞形状描述方法一 Meshlab 自动测量方法二 人为测量 4 加入XACRO函数简化描述 最终结果展示侧视图正视图碰撞几何体中心点设置不对出现的结果 写在前面的话 本文使用的 URDF 文件是由 solidworks 的 URDF export 插件生成,详情请看上一篇文章:solidwor

xacro->urdf->pdf
在ROS 2系统中,要将xacro文件转换为PDF文件,可以按照以下步骤操作: 步骤1:将Xacro文件转换为URDF文件 首先,需要将xacro文件转换为urdf文件。可以使用ROS 2提供的xacro工具来完成这个转换。 ros2 run xacro xacro path_to_xacro_file.xacro -o output.urdf -o等价于> ros2 run xacr
ROS 2边学边练(47)-- 利用Xacro精简代码
前言 Xacro(XML Macro)是ROS(Robot Operating System)中用于处理URDF(Unified Robot Description Format)文件的一个宏处理工具。它允许你在URDF文件中定义和使用宏,这样可以减少重复的代码,并使得机器人描述更加清晰和易于管理。通过xacro,你可以定义变量、包含其他文件、执行条件语句等,这些功能都使得编写和
ROS 机器人描述--URDF和XACRO
1. 关于URDF的一些杂谈 URDF(Unified Robot Description Format), 是一种特殊的xml文件格式, 作为机器人的一种描述文件, 在ROS里面大量使用. 接触ROS比较久的同学, 应该会经常见到一种类似命名的包(package) – xxx_description. 这个包里面就是包含某个机器人的描述文件. 比如pr2_decription, baxter_
ROS-机器人仿真urdf-rviz、xacro
文章目录 一、urdf集成rviz1.1 基本流程1.2 优化 rviz 启动 二、urdf语法详解2.1 robot2.2 link2.3 joint2.4 urdf练习2.5 urdf工具 三、URDF优化_xacro3-1 Xacro_语法详解3-2 Xacro_完整使用流程示例3- Xacro_实操 一、urdf集成rviz 1.1 基本流程 需求描述: 在 Rviz

ROS-安装xacro
安装 运行下列命令进行安装,xxxxxx处更改为自己的版本 sudo apt-get install ros-xxxxxx-xacro 运行 输入下列命令 roscd xacro 如果没有报错,并且进入了xacro软件包的目录,则表示安装成功。 参考: [1]https://wenku.csdn.net/answer/3ei40j3aj9
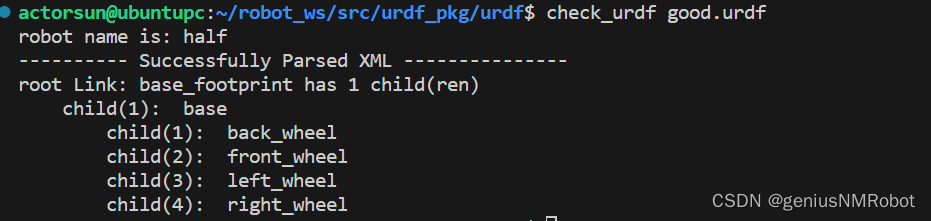
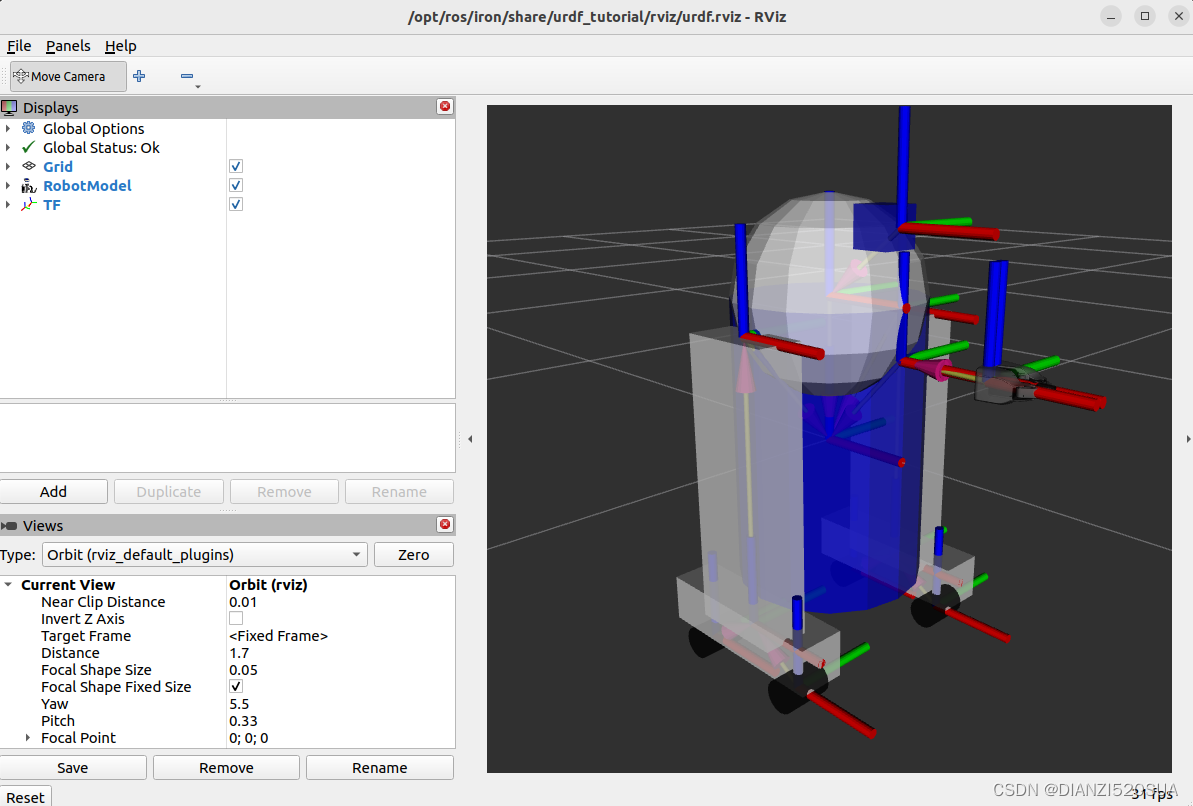
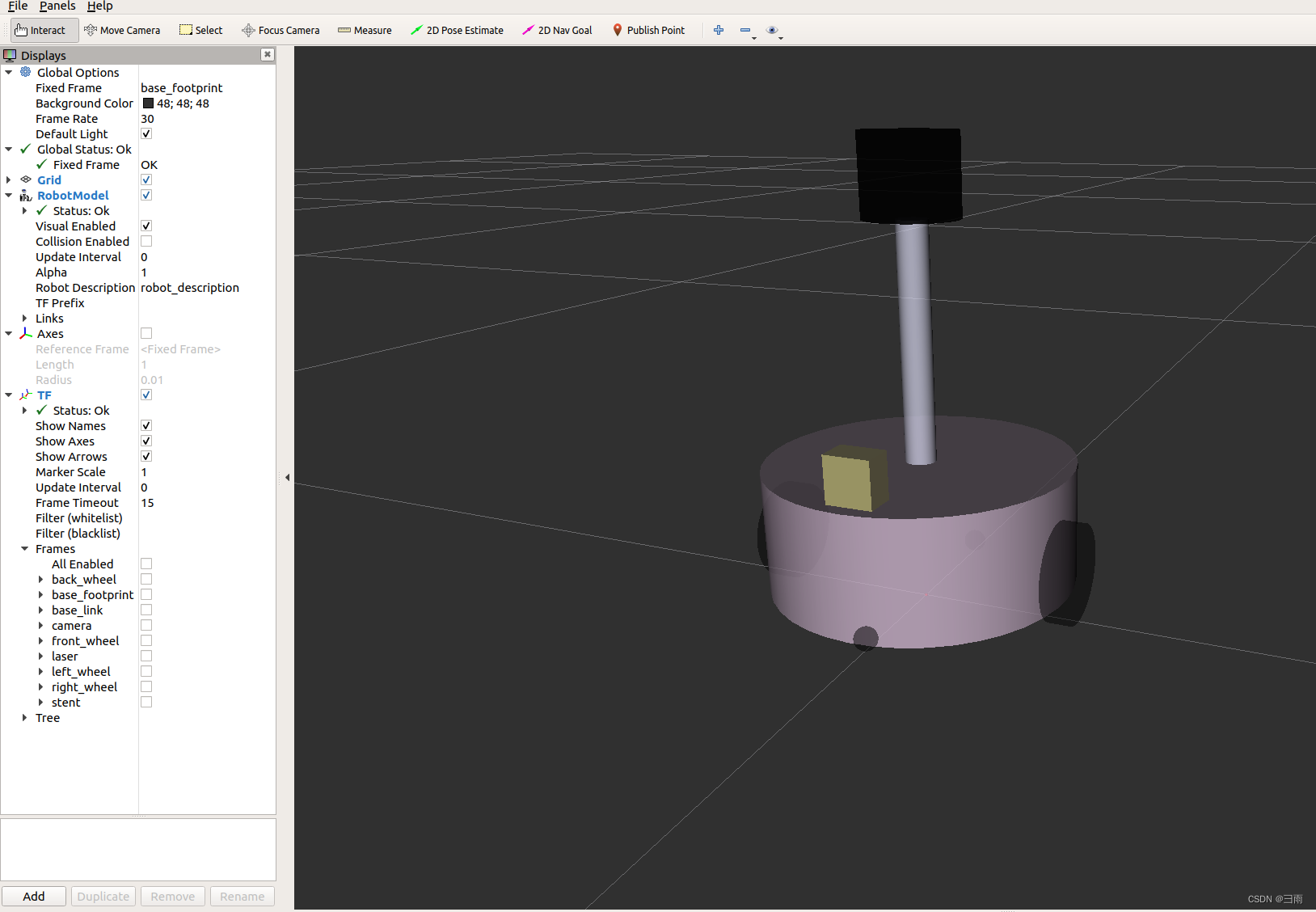
ros2/ros 4轮2驱机器人xacro/urdf文件示例代码
这个实验中最重要的是:colcon build 之后要记得source install/setup.bash.否则修改的文件是不会更新的。知道了吧 <robot name="half" xmlns:xacro="http://wiki.ros.org/wiki/xacro"><xacro:property name="PI" value="3.1415926"/><!--定义一个变量P

机器人仿真-gazebo学习笔记(4)xacro和传感器添加
1.xacro简介 URDF文件不具备代码复用的特性(在上一篇文章也能发现,其实左右轮是极其相似的但还是要单独描述),一个复杂的机器人模型会拥有大量了的传感器和关节组件,这时候使用URDF文件就太难阅读了。精简化、可复用、模块化的xacro文件来了。 1.优势: ·精简模型代码:xacro是一个精简版本的URDF文件,在xacro中可以通过宏定义来复用代码(这就跟c语言和python一样模块

ROS入门(六)——仿真机器人二(Xacro+Rviz+Arbotix小车运动)
所用的学习链接: 【奥特学园】ROS机器人入门课程《ROS理论与实践》零基础教程P252-270 【以上视频笔记见http://www.autolabor.com.cn/book/ROSTutorials/】 前文参考ROS入门(五)——仿真机器人一(URDF+Rviz) 一、介绍 1.Xacro作用 Xacro 是 XML Macros 的缩写,Xacro 是一种 XML 宏语言,是