本文主要是介绍一个人推导出“2阶LADRC是一种严格数学意义上的PID与2阶低通滤波器的串级结构,1阶LADRC是PI与1阶低通滤波器的串级结构”,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摘自:https://zhuanlan.zhihu.com/p/259297165
关于用ADRC控制无人机的部分真相
Li Jun
控制领域不懂控制的重量级大牛
在2017年,我已经推导出2阶LADRC是一种严格数学意义上的PID与2阶低通滤波器的串级结构,1阶LADRC是PI与1阶低通滤波器的串级结构,完成论文“一种新型抗扰控制方法的研究与应用”并投稿给《控制理论与应用》,审稿意见说我曲解ADRC,后论文发表在广东电力,2018,03:1-8。
今天你再看看,ADRC不是已经发展出抗扰PID即DR-PID,这肯定不是韩老师希望的结果。韩老师提出了一种很好的思想即“韩京清思想”,但是被教条派发展坏了即教条派不可能真正发展“韩京清思想”,一些同学表态要对这个问题进行反思。
今天,新型基础控制技术NFC的发明是对“韩京清思想”的真正发展。
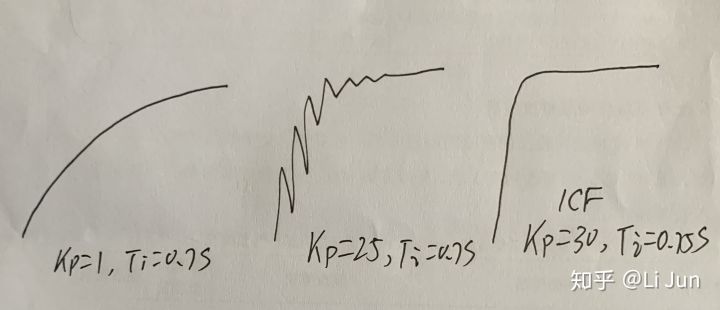
有同学来信说,ADRC参数不好整定,NFC能否用于无人机控制?,我的看法是:NFC不适用于无人机控制,可以采用1阶LADRC或者采用PI,他们根本没有区别。如果你的目的是发文,你可以说将ADRC运用于无人机控制,但是在实际你可以采用PI控制,需要设置较高的比例增益,但是绝对不是普通PI,需要在普通PI的比例项增加1个低通滤波器,最好是类似1阶最速跟踪滤波器,比较成熟的是一种惯性组合滤波器ICF。最后同学说效果很好,这就是无人机运用了ADRC。表面上这是造假,但是为发文造假多的去,本质上这也不算造假,因为根本没有区别。总之,ADRC的理论都是定式,照抄一篇,然后找一个具体系统用PI给出一个仿真结果,如果感觉仿真结果好就将PI参数转换为ADRC参数,发篇文章挺好的。
有图有真相
在此明确,NFC不是要取代PID,这是一个选择的问题,具体说,在低阶过程采用PID已经足够了,NFC适用于高阶纯滞后过程,例如流程工业的过程控制。
编辑于 11 小时前
这篇关于一个人推导出“2阶LADRC是一种严格数学意义上的PID与2阶低通滤波器的串级结构,1阶LADRC是PI与1阶低通滤波器的串级结构”的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






