pi专题

使用Azure Devops Pipeline将Docker应用部署到你的Raspberry Pi上
文章目录 1. 添加树莓派到 Agent Pool1.1 添加pool1.2 添加agent 2. 将树莓派添加到 Deployment Pool2.1 添加pool2.2 添加target 3. 添加编译流水线3.1 添加编译命令3.2 配置触发器 4. 添加发布流水线4.1 添加命令行4.2 配置artifact和触发器 5. 完成 1. 添加树莓派到 Agent Pool

Banana Pi BPI-F3 进迭时空RISC-V架构下,AI融合算力及其软件栈实践
RISC-V架构下,AI融合算力及其软件栈实践 面对未来大模型(LLM)、AIGC等智能化浪潮的挑战,进迭时空在RISC-V方向全面布局,通过精心设计的RISC-V DSA架构以及软硬一体的优化策略,将全力为未来打造高效且易用的AI算力解决方案。目前,进迭时空已经取得了显著的进展,成功推出了第一个版本的智算核(带AI融合算力的智算CPU)以及配套的AI软件栈。 软件栈简介 AI算法部署旨

基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于PI控制算法的异步感应电机转速控制系统simulink建模与仿真。PI控制器是一种经典的线性控制器,它通过将控制量的比例部分和积分部分相结合来实现对系统输出的调节。比例部分用于快速响应偏差,而积分部分则用于消除稳态误差。 2.系统仿真结果 (完整程

Banana Pi BPI-SM9 AI 计算模组采用算能科技BM1688芯片方案设计
产品概述 香蕉派 Banana Pi BPI-SM9 16-ENC-A3 深度学习计算模组搭载算能科技高集成度处理器 BM1688,功耗低、算力强、接口丰富、兼容性好。支持INT4/INT8/FP16/BF16/FP32混合精度计算,可支持 16 路高清视频实时分析,灵活应对图像、语音、自然语言等场景,可集成于智算服务器、边缘智算盒、工控机、无人机、AIOT等多种类型产品。 Banana

利用raspberry pi搭建typecho笔记(三) typecho nginx sqlite FAQ
前言 这是一个汇总文,用来总结我在整个配置过程中遇到的各种问题.因为我在解决这些问题的过程中发现,typecho被部署在这种需要完全自己配置的平台上的情况是比较少的,相关的资料也比较少,所以我的解决过程比较困难,因此在此之后,想把这些问题和解决方案都整理出来,如果有同样需要的人,可以直接参考,少走弯路. 1.typecho安装过程中提示"对不起,无法连接数据库,请先检查数据库配置再继续进行安
如何在 Raspberry Pi 5 上设置 Raspberry Pi AI Kit
本指南将帮助您在 Raspberry Pi 5 上安装 Raspberry Pi AI Kit。这将使您能够使用 Hailo AI 神经网络加速器运行 rpicam-apps 摄像头演示。 如果您在开始安装人工智能套件之前需要帮助,本指南提供了安装过程的分步图片。 安装人工智能套件:https://www.raspberrypi.com/documentation/accessorie

树莓派(RPI/Raspberry Pi):一款基于ARM的微型电脑主板【为学习计算机编程教育而设计,只有信用卡大小的微型电脑,其系统基于Linux】
Raspberry Pi(中文名为“树莓派”,简写为RPi,(或者RasPi / RPI) 是为学习计算机编程教育而设计,只有信用卡大小的微型电脑,其系统基于Linux。 随着Windows 10 IoT的发布,我们也将可以用上运行Windows的树莓派。 自问世以来,受众多计算机发烧友和创客的追捧,曾经一“派”难求。别看其外表“娇小”,内“芯”却很强大,视频、音频等功能通通皆有,可谓是“麻雀虽

用Java近似求pi,利用公式pi=4*(1-1/3+1/5-1/7+.....)
public class Welcome { public static void main(String[] args) { // TODO Auto-generated method stub double pi=0; double n=1; double sum=0; double k=1; while((pi-Math.PI)>0.0000001||(Math.PI-pi)>0.00000

基于爬山法MPPT和PI的直驱式永磁同步风力发电机控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1 PMSM 4.2 MPPT 4.3 PI 控制器原理 5.完整工程文件 1.课题概述 基于爬山法最大功率点跟踪 (Maximum Power Point Tracking, MPPT) 和比例积分控制器 (Proportional Integral, PI) 的直驱式永磁同

树莓派 Raspberry Pi SD卡系统备份与还原
近半年时间用来监控陆龟的树莓派 Raspberry Pi 还算稳定,可到了冬天龟箱里的加热灯长时间加热导致树莓派温度很高,时不时的自动重启。如果每次都能正常起来也就罢了,可偶尔会挂不上SD卡的文件系统直接宕了,还得用备份还原SD卡(如果没备份那就悲催了)。 买树莓派的时候只想到存储空间大能多存的东西于是买了个16GB的SD卡,可实际用了2G空间不到。最开始备份树莓派SD卡是用windwos
![[Raspberry Pi]如何利用docker執行motioneye,並利用Line Notify取得即時通知和照片?](https://i-blog.csdnimg.cn/direct/bcc7fa8da49c4c9eb2b8c0bfbc406d9b.jpeg)
[Raspberry Pi]如何利用docker執行motioneye,並利用Line Notify取得即時通知和照片?
[Motioneye]How to setup motion detection and send message/image for Line Notify 無意間,翻了一本關於樹莓派的書籍,除了樹莓派的簡介和應用外,也包含初階和高階的Linux運作邏輯,書籍結構相當完整,也因此需要花時間細細體會其內容。其在樹莓派的應用內容,提及一款開源影像監視軟體motioneye,motioney

《嵌入式系统 – 玩转ART-Pi开发板(基于RT-Thread系统)》第7章 环境监测系统(二)
原文地址 《嵌入操作系统 – 玩转ART-Pi开发板》第7章 环境监测系统(一) 7.3联网【WiFi】 ART-Pi有两种联网方式,一个是板载的WiFi模块AP6212,这个模块自带蓝牙;另一个是工业扩展板的网口,使用的芯片是LAN8720A,我没有扩展板,这里就只讲解如何使用WiFi联网。这里先看看WiFi的电路。 图11 AP6212芯片 图12 WiFi和BT接口
《嵌入式系统 – 玩转ART-Pi开发板(基于RT-Thread系统)》第7章 环境监测系统(一)
原文地址 开发环境: RT-Thread版本:4.0.3 操作系统:Windows10 Keil版本:V5.30 RT-Thread Studio版本:2.0.1 开发板MCU:STM32H750XB 从本章开始,笔者不在就某一个单一功能讲解,而是针对某一个具体的项目作为讲解的主要内容。 7.1前言 第一个项目是一个环境监测系统,我相信很多朋友都做过,我这里主要从宏观层面来把握,你学会这个

《嵌入式系统 – 玩转ART-Pi开发板(基于RT-Thread系统)》第9章 基于Select/Poll实现并发服务器(一)
开发环境: RT-Thread版本:4.0.3 操作系统:Windows10 RT-Thread Studio版本:2.1.1 开发板MCU:STM32H750XB LWIP:2.0.2 并发服务器支持多个客户端的同时连接,最大可接入的客户端数取决于内核控制块的个数。当使用Socket API时,要使服务器能够同时支持多个客户端的连接,必须引入多任务机制,为每个连接创建一个单独的任务来处理连接上
《嵌入式系统 – 玩转ART-Pi开发板(基于RT-Thread系统)》第8章 APT-Pi双网络实现自动切换
ART-Pi中有多种联网方式,最常用有两种:一个是自带的Wifi模块AP6212,另外一个是以太网,ART-Pi使用的PHY芯片是LAN8720A。 笔者在前面的文章已经讲解了Wifi的使用。 Wifi的移植使用 关于以太网的讲解请看笔者以前文章: 详解以太网(一) 详解以太网(二) 接下来将讲解以太网的使用。 8.1以太网硬件介绍 在讲解移植步骤之前,有必须先介绍我们的实
树莓派 raspberry pi GPIO python
转自https://blog.csdn.net/m0_38039437/article/details/80300680 树莓派 raspberry pi GPIO python RPiGPIO模块基本使用 导入模块引脚编号方式设置一个通道输入输出设置多个通道的输出清空GPIO 输入 上拉或者下拉电阻测试输入轮询中断与边沿检测线程回调开关去抖GPIO 输出 设置RPiGPIO设置

【Remi Pi开发板镜像烧录】使用sd卡进行瑞米派镜像的烧录
烧录大典 按照《软件开发指南》4.2.1和4.2.2的顺序进行,具体烧录哪个镜像结合你自己的需求,每个镜像的区别参考以下链接 https://mbb.eet-china.com/forum/topic/143906_1_1.html Tera term界面全屏如下设置看着比较舒服 设置完之后setup->save->保存替换掉原来的ini文件以后每次打开不用重新配置了 文

【Remi Pi使用HDMI屏幕显示QT界面】将QT工程在Ubuntu虚拟机交叉编译好拷贝到开发板并运行
开发板和Ubuntu虚拟机ssh连接 可以成功点亮hdmi屏幕(默认是运行的mxapp2程序显示如下) 可以在开发板上运行自己的qt程序界面 手动配置开发板以太网ip ip addr add 192.168.43.101/24 brd + dev eth0 ip link set eth0 (2)虚拟机先配置虚拟网络成NAT模式 https://blog.csdn.net

【Remi Pi开发环境搭建】主要包括虚拟机的创建以及开发板镜像的烧录
首先看《软件开发指南》前四章比较有用(搭建环境),包括基于Yocto 项目构建运行在Remi Pi 开发板上的系统镜像,并且将镜像烧录到开发板上的完整流程。 第一步环境搭建主要包括两部分 (1)开发主机环境:构建在Vmware上的你的Linux虚拟机(yocto需要在Linux系统中进行构建) (2)软件环境:虚拟机上有yocto构建的开发板镜像 第二步使用yocto构建开发板镜像
constnbsp;intnbsp;*pi与intamp;nbs…
此质料是摘要:<<彻底搞定C 指针 >>,自己感觉比较有价值,现与大家分享。 1. 从const int i 说起 你知道我们声明一个变量时象这样int i ;这个i是可能在它处重新变赋值的。如下: int i = 0; i = 20; 不过有一天我的程序可能需要这样一个变量(暂且称它变量),在声明时就赋一个初始值。之后我的程序在其它任何处都不会再去重新对它赋值。那我又应该怎么办呢?用co
树莓派(Raspberry Pi 3)-远程登录与远程桌面
树莓派3在刷完系统后,是不能直接远程登录的,因为ssh服务默认没有开启,我们需要手动开启开启ssh,可通过ubuntu电脑修改SD卡内文件实现,此方式也可打开树莓派的wifi连接。重启之后不需要网线即可通过putty登录,此时只能远程登录,不能远程桌面,通过设置,可以实现windows自带远程桌面,vnc远程桌面以及ubuntu远程桌面。 开启ssh 1、把刷好系统的SD卡插入到ubunt
树莓派(Raspberry Pi 3)-wifi连接
树莓派(Raspberry Pi 3)-wifi连接 树莓派3有wifi功能,我们可以通过设置让树莓派连接上wifi,这样以后我们要远程登录树莓派是就不需要在插网线了,具体方法如下: 如果已经可以远程登录 则在登录之后执行如下命令 sudo nano /etc/wpa_supplicant/wpa_supplicant.conf 添加如下内容 network={ssid="xxx"ps

树莓派(Raspberry Pi 3) - 系统烧录
1、下载系统,官网地址:https://www.raspberrypi.org/downloads/ 下载 Raspbian 系统(下载系统时推荐下载RASPBIAN JESSIE WITH PIXEL完整版,RASPBIAN JESSIE LITE简装版不带图形化界面),下载完成后,将压缩包解压,获得Raspbian镜像文件。 请注意下图,如果下载了第二个固件是没有桌面,因为当时下

【Orange Pi 5与Linux编程编程】-POSIX消息队列
Linux系统中的POSIX消息队列编程 文章目录 Linux系统中的POSIX消息队列编程1、POSIX 消息队列2、Linux 中的 POSIX 消息队列命名3、POSIX 消息队列调用3.1 mq_open, mq_close3.2 mq_timed_send、mq_send、mq_timed_receive、mq_receive3.3 mq_notify3.4 mq_unlink3

【MATLAB源码-第229期】基于matlab的有源功率因数校正仿真,采用PI调节改善功率因数;改善后达到99%.
操作环境: MATLAB 2022a 1、算法描述 一、整体结构概述 有源功率因数校正(APFC)是一种用于提高电力系统功率因数的技术,通过控制电流的波形,使其与电压的波形保持一致,从而减少无功功率的产生,提高系统的效率。该仿真模型采用PI调节器来实现功率因数的校正。以下将对图中各个模块和其连接进行详细描述。 二、输入电源部分 交流输入电压(Vg):这是系统的输入电源,通常为交流电源
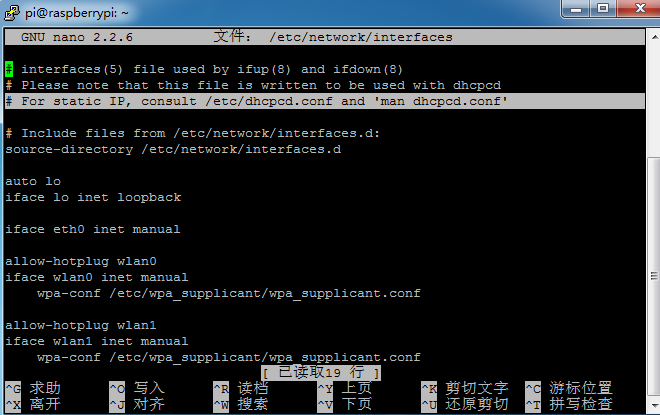
Raspberry PI 3静态IP配置
之前在Digilent社区share的一个帖子,贴到这里仅供大家参考。 好像是因为Rasbian新系统的原因,网上现在能搜到的配置树莓派静态IP的文章99.9%都一样,都不能用。 按照原来的教程,输入sudo nano /etc/network/interfaces后,我们可以看到