串级专题

共轴麦轮直立、运动、位置串级PID
角度PID 微分项Angle_Pram[KD] * gyroy:根据角速度的变化率来调整电机PWM,角速度变化越快,调整的幅度也越大。 速度PID Encoder_Least = (Encoder1 + Encoder2 + Encoder3 + Encoder4) - Trg_Speed;:计算速度偏差,即四个编码器的读数之和与目标速度Trg_Speed的差值。 Enc

5.9.9 串级PID控制器
文章目录 5.9.9 串级PID控制器(1)串级PID控制器原理(2)内环与外环(3)Matlab读写Excel文件数据(4)软件设计(5)运行与调试 总目录:http://t.csdnimg.cn/YDe8m 5.9.9 串级PID控制器 (1)串级PID控制器原理 我们已知单一的角速度PID控制系统,其原理如图5.9.8所示。其可以简化为图5.9.19:

串级PID控制四轴飞行状态-分析
参考网页: http://blog.csdn.net/nemol1990/article/details/45131603 一、概念 单极PID:当你知道系统当前状态和期望状态后,如何将系统从当前状态调整到期望状态是个问题,在此我们可以用PID进行调整,PID分为位置式和增量式,位置式适合舵机等系统,在此使用的是增量式。 公式:PID=P*e(n)+I*[(e(n)+e(n-1)+…+e(0
自抗扰控制理论(四)ADRC控制串级系统
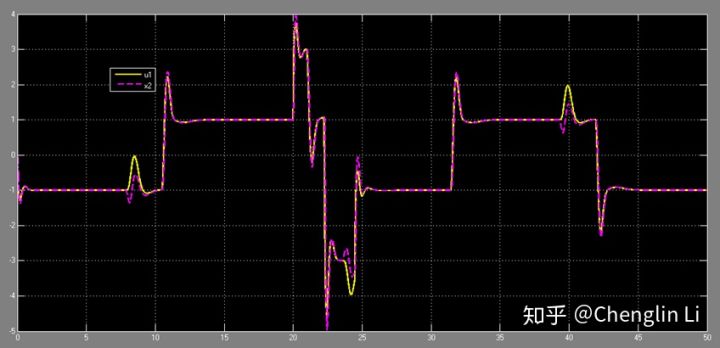
刚刚优酷里面看到一个用串级ADRC弄无人机的视频 https://v.youku.com/v_show/id_XNDA5MTY5ODQxNg==.html 摘自:https://zhuanlan.zhihu.com/p/115344982 自抗扰控制理论(四)ADRC控制串级系统 Chenglin Li 厦门大学 飞行器设计硕士在读 1 概念 用控制量u驱动其中
一个人推导出“2阶LADRC是一种严格数学意义上的PID与2阶低通滤波器的串级结构,1阶LADRC是PI与1阶低通滤波器的串级结构”
摘自:https://zhuanlan.zhihu.com/p/259297165 关于用ADRC控制无人机的部分真相 Li Jun 控制领域不懂控制的重量级大牛 在2017年,我已经推导出2阶LADRC是一种严格数学意义上的PID与2阶低通滤波器的串级结构,1阶LADRC是PI与1阶低通滤波器的串级结构,完成论文“一种新型抗扰控制方法的研究与应用”并投稿给《控制理论与应用》,

手把手带你玩串级PID仿真实验
写在前面的话: 由于在设计四旋翼飞行器的时候用到了串级PID控制,因此花了一点时间搞了搞,真正想学相关的理论的,当然是去看胡寿松的红皮《自动控制原理》啦,只是感觉书上的纯理论推导很不直观,之后查了一些乱七八糟的文档,实验之类的,感觉还是用仿真实际调一调,看看波形比较直观,便于学习和理解。于是整理一下学习笔记,发上来保存,同时也希望能让想了解串级PID(尤其是做四旋翼控制的盆友们)得到一丢丢帮助。