本文主要是介绍Maxwell 3D仿真转矩有正有负,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
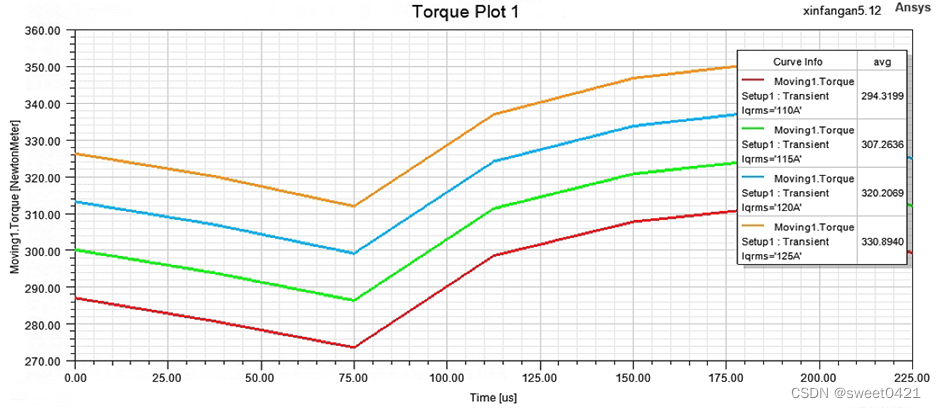
情景描述:盘式电机设计,跟着b站的吮指原味鸡老哥一步步整的,先开始的方案因为某些参数原因,得要调整。有了第一轮的操作经验以后,直径跳过教学视频自己上手整了。到了根据峰值转速下加不同电流出来的转矩波形来确定具体电流值为多少时,遇到了转矩从正值一直到负值的情况了。如下图:
解决方法:根据第一个案例模型去检查,发现是参数化的时候,一开始设置band域的转速为4000rpm,后面设置转速为rotor_speed了,band域的转速没有更正过来,导致后期再最大转速下的仿真出现了转矩有正有负的情况了。
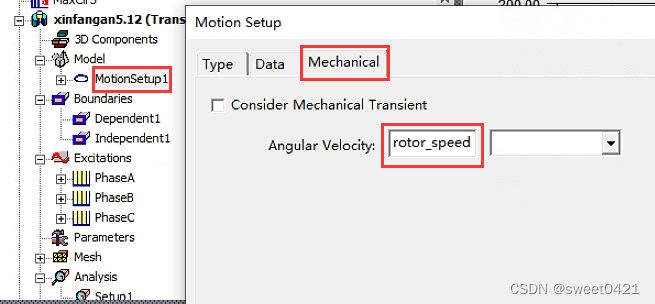
将该处更正过来后,转矩就正常了。
总结:得要细心。。。。
这篇关于Maxwell 3D仿真转矩有正有负的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







