本文主要是介绍四元数,欧拉角,旋转矩阵,旋转向量,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
四元数,旋转矩阵,旋转向量,欧拉角
一、欧拉角
1、欧拉角是表达旋转的最简单的一种方式,形式上它是一个三维向量,其值分别代表物体绕坐标系三个轴(x,y,z轴)的旋转角度,默认旋转正向为逆坐标轴逆时针方向。
2、在旋转过程中,xyz轴方向并不是固定不变的,而是随着前面的旋转而改变。比如如果绕 x 轴旋转 90 度,那么旋转后的 y 轴正向将指向原始的 z 轴方向,而旋转后的 z 轴正向将指向 y 轴负向。由此可以看出,欧拉角对应的具体旋转与 xyz 轴的旋转顺序是有关的,相同的 xyz 旋转角度,如果按 xyz 的顺序进行旋转使用按 zyx 的顺序进行旋转,得到的结果是不一致的。
3、在具体应用中,xyz 轴朝向不固定,需要具体情况具体分析。
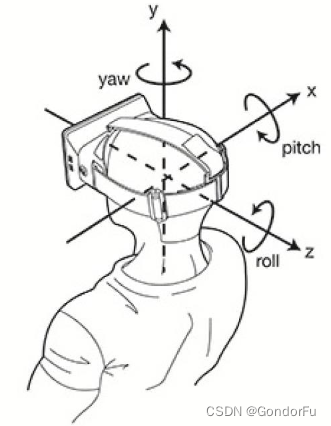
- pitch:绕 x 轴旋转,
- yaw:绕 y 轴旋转,
- roll:绕 z 轴旋转,
4、欧拉角表示最大的问题是存在万向锁问题。万向锁(Gimbal lock)是在使用动态欧拉角表示三维物体的旋转时出现的问题。一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。
二、四元数
四元数通过四个实数描述三维旋转,,其中
。
三、旋转向量
旋转向量用一个三维向量来表示三维旋转变换,该向量的方向是旋转轴,其模则是旋转角度。
转换方法
一、scipy.spatial.transform.Rotation
官方文档:
https://docs.scipy.org/doc/scipy/reference/generated/scipy.spatial.transform.Rotation.html#scipy.spatial.transform.Rotation
from scipy.spatial.transform import Rotation as R# 从四元数加载
r = R.from_quat([0, 0, np.sin(np.pi/4), np.cos(np.pi/4)])# 从旋转矩阵加载
r = R.from_matrix([[0, -1, 0],[1, 0, 0],[0, 0, 1]])# 从旋转向量加载
r = R.from_rotvec(np.pi/2 * np.array([0, 0, 1]))# 从欧拉角加载
r = R.from_euler('zyx', [
[90, 0, 0],
[0, 45, 0],
[45, 60, 30]], degrees=True)# 使用四元数表示
r.as_quat()# 使用旋转矩阵表示
r.as_matrix()# 使用旋转向量表示
r.as_rotvec()# 使用欧拉角表示
r.as_euler('zyx', degrees=True)# 取逆
inv_r = r.inv()# 对点进行旋转
r.apply(v)二、pyquaternion.Quaternion
官方文档:https://kieranwynn.github.io/pyquaternion/
r = Quaternion([w, x, y, z]).rotation_matrix旋转矩阵和平移向量的特殊操作
如果给定 A2B 的旋转矩阵和平移向量,但是需要 B2A 的旋转矩阵和平移向量,可以如此操作:
R_B2A = np.linalg.inv(R_A2B)
T_B2A = -np.dot(R_A2B, T_A2B)这篇关于四元数,欧拉角,旋转矩阵,旋转向量的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






