本文主要是介绍辅助驾驶功能开发-上游需求篇(3)-1-1V1R方案对上游感知需求,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 简介
1.1 术语
1.1.1 缩略语
| CMbB | Collision mitigation by Brake |
| LKA | Lane Keeping Assistant |
| RWUP | Real World User Profile |
1.1.2 定义
| Ambiguous line patterns | 不明确的线条模式定义为: 存在多个车道标记,并且车道标记定义行驶车道的合理假设不只一种。 |
| Bicyclist | 固定或移动自行车包括任何年龄和体型的骑自行车的人。 |
| CMbB ROI 1 | TTX 小于 2 s 且 YOHP 在 TTX 小于 1.3 m 时覆盖物体的区域。 |
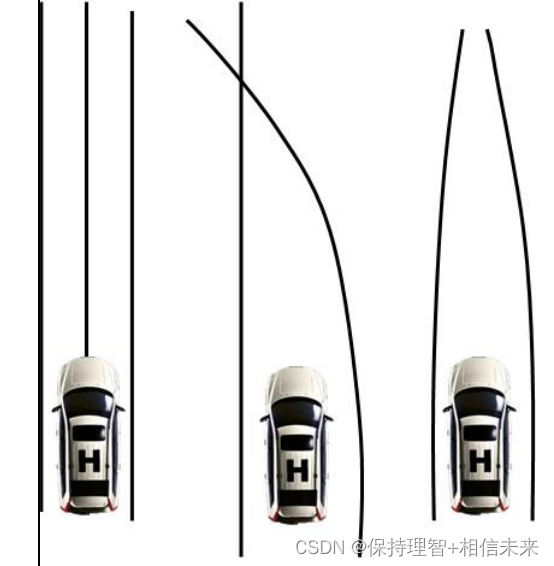
| Complex line patterns | 复杂的线路图案是可能导致不正确的功能性能的线路图案。 复杂线条图案的示例有:
|
这篇关于辅助驾驶功能开发-上游需求篇(3)-1-1V1R方案对上游感知需求的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






