本文主要是介绍二值图像分析–直线拟合与极值点寻找,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在图像的处理中,会遇到一种情况,根据给定的点集(比如轮廓)拟合出一条直线的情景。
1.最小二乘法拟合直线
最小二乘法多项式直线拟合,根据给定的点,求出它的函数 y = f ( x ) y=f(x) y=f(x),当然求得准确的函数是不太可能的,但是我们能够求出它的近似曲线 y = φ ( x ) y=φ(x) y=φ(x)。
原理:
假如有点I = 1,2,3,……n,求近似曲线 y = φ ( x ) y=φ(x) y=φ(x),并且使得 y = φ ( x ) y=φ(x) y=φ(x)与 y = f ( x ) y=f(x) y=f(x)的平方偏差和最小偏差:
现在有点( x 1 , y 1 x_1,y_1 x1,y1),( x 2 , y 2 x_2,y_2 x2,y2)···( x n , y n x_n,y_n xn,yn)
设: 拟合多项式为: y = a x + b y=ax+b y=ax+b
平方偏差和如下:
e 2 = ∑ i = 1 n ( y i − y ) 2 = ∑ i = 1 n ( y i − ( a x + b ) ) 2 e^2=\sum_{i=1}^{n}(y_i-y)^2 =\sum_{i=1}^{n}(y_i-(ax+b))^2 e2=i=1∑n(yi−y)2=i=1∑n(yi−(ax+b))2
其中我们要找到一组最好的a和b,“最好的”就是要使选出的a b能使得所有的误差达到最小化。所以上面得到的 e 2 = ∑ i = 1 n ( y i − ( a x + b ) ) 2 e^2=\sum_{i=1}^{n}(y_i-(ax+b))^2 e2=∑i=1n(yi−(ax+b))2就是一个关于a和b的函数。
2.多元函数极值与最值问题的理论依据
二元函数取极值的必要条件(类比一元函数)。

可以看到最小二乘法对各个变量求偏导,使得偏导值为0,即可得到最小值,因为e是关于a、b的函数,导数为0的点必定是最小值。
分别对a、b求偏导:
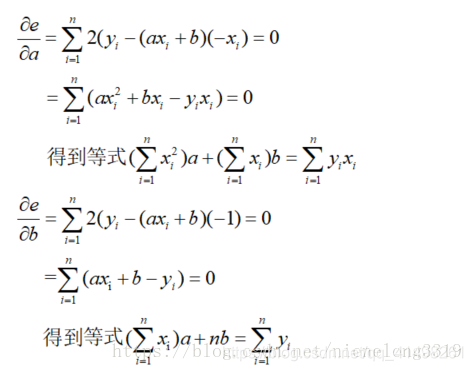

OpenCV中的API
-
说明
使线拟合2D或者3D点集。函数fitLine通过最小化 ∑ i ρ ( r i ) \sum_i \rho(r_i) ∑iρ(ri)将线拟合到2维或3维点,其中 r i r_i ri是第 i t h i^{th} ith个点之间的距离,该线和 ρ ( r ) \rho(r) ρ(r)是一个距离函数。
该算法基于M-estimator技术,该技术使用加权最小二乘算法迭代拟合直线。每次迭代后,权重 w i w_i wi被调整 ρ ( r i ) \rho(r_i) ρ(ri)。
-
声明
void fitLine(InputArray points, OutputArray line, int distType,double param, double reps, double aeps ); -
参数
points 用于拟合直线的输入点集,可以是2维或者3维点向量。保存在std::vector<>或者Mat中。 line 输出的直线。对于二维直线而言,类型为cv::Vec4f;对于三维直线类型,则为cv::Vec6f。输出参数的前半部分给出的是直线的方向,而后半部分给出的是直线上的一点(即通常所说的点斜式直线)。 distType 距离类型。拟合直线时,要使输入点到拟合直线的距离和最小化,可供选择的距离类型如下, r i r_i ri表示的是输入的点到直线的距离。 param 某些距离类型的数值参数(C)。跟所选的距离类型有关,值可以设置为0,cv::fitLine()函数本身会自动选择最优化的值如果为0。 reps 半径的足够精度(坐标原点和直线之间的距离)。 aeps 角度精度足够。对于reps和aeps,0.01将是一个很好的默认值。 distType类型
① DIST_L2
ρ ( r ) = r 2 / 2 (the simplest and the fastest least-squares method) \rho(r) = r^2/2 \quad \text{(the simplest and the fastest least-squares method)} ρ(r)=r2/2(the simplest and the fastest least-squares method)
② DIST_L1
ρ ( r ) = r \rho (r) = r ρ(r)=r
③ DIST_L12
ρ ( r ) = 2 ⋅ ( 1 + r 2 2 − 1 ) \rho (r) = 2 \cdot ( \sqrt{1 + \frac{r^2}{2}} - 1) ρ(r)=2⋅(1+2r2−1)
④ DIST_FAIR
ρ ( r ) = C 2 ⋅ ( r C − log ( 1 + r C ) ) where C = 1.3998 \rho \left (r \right ) = C^2 \cdot \left ( \frac{r}{C} - \log{\left(1 + \frac{r}{C}\right)} \right ) \quad \text{where} \quad C=1.3998 ρ(r)=C2⋅(Cr−log(1+Cr))whereC=1.3998
⑤ DIST_WELSCH
ρ ( r ) = C 2 2 ⋅ ( 1 − exp ( − ( r C ) 2 ) ) where C = 2.9846 \rho \left (r \right ) = \frac{C^2}{2} \cdot \left ( 1 - \exp{\left(-\left(\frac{r}{C}\right)^2\right)} \right ) \quad \text{where} \quad C=2.9846 ρ(r)=2C2⋅(1−exp(−(Cr)2))whereC=2.9846
⑥ DIST_HUBER
ρ ( r ) = { r 2 / 2 i f r < C C ⋅ ( r − C / 2 ) o t h e r w i s e where C = 1.345 \rho (r)= \begin{cases} r^2/2 &if \ \ r < C \\ C \cdot (r-C/2) &otherwise \end{cases} \quad \text{where} \quad C=1.345 ρ(r)={r2/2C⋅(r−C/2)if r<CotherwisewhereC=1.345
应用
void apprixiLine() {//创建一个用于绘图的空白图Mat src = Mat::zeros(480, 640, CV_8UC3);//输入需要拟合的点vector<Point> points;points.push_back(Point(48, 58));points.push_back(Point(105, 98));points.push_back(Point(155, 160));points.push_back(Point(212, 220));points.push_back(Point(248, 260));points.push_back(Point(320, 300));points.push_back(Point(350, 360));points.push_back(Point(412, 400));//将拟合点画到空白画板上for (size_t i = 0; i < points.size(); i++){circle(src, points[i], 5, Scalar(0, 0, 255));}imshow("src", src);Vec4f line_para;fitLine(points, line_para, DIST_L2, 0, 1e-2, 1e-2);cout << "line_para: " << line_para << endl;Point point0;point0.x = line_para[2];point0.y = line_para[3];cout << "point0:[" << point0.x << "," << point0.y << "]" << endl;double k = line_para[1] / line_para[0];cout << "k=" << k << endl;//计算直线的端点Point point1, point2;point1.x = 0;point1.y = k * (0 - point0.x) + point0.y;point2.x = 640;point2.y = k * (640 - point0.x) + point0.y;cout << "point1:[" << point1.x << "," << point1.y << "]" << endl;cout << "point2:[" << point2.x << "," << point2.y << "]" << endl;line(src, point1, point2, Scalar(0, 255, 0), 2);imshow("dst", src);
}


- 事例二
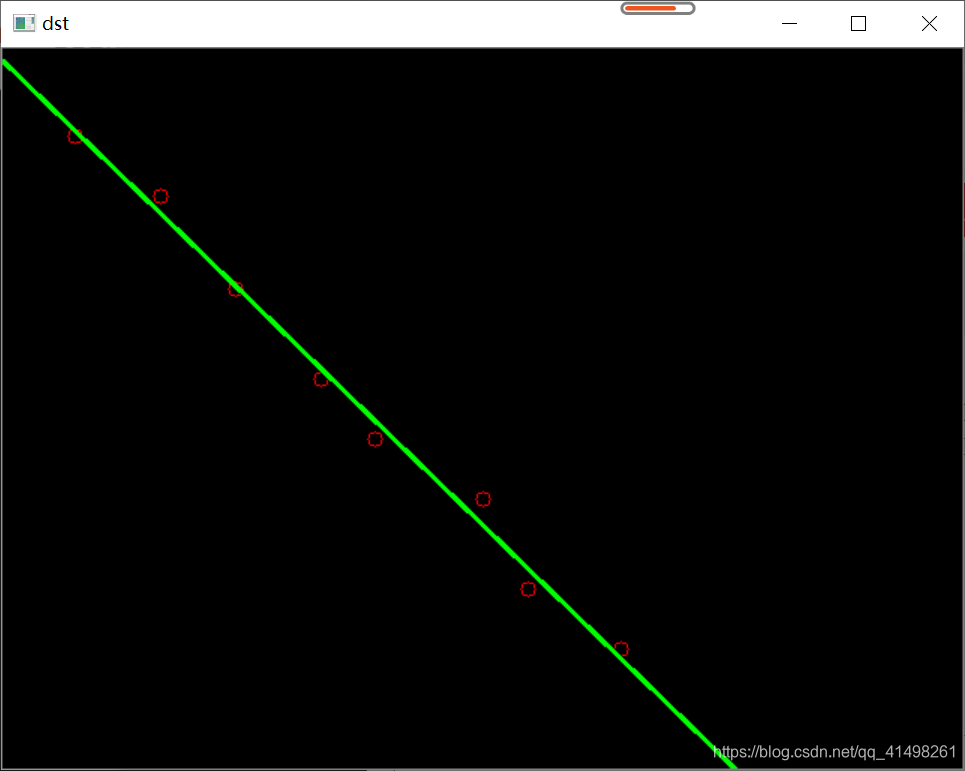
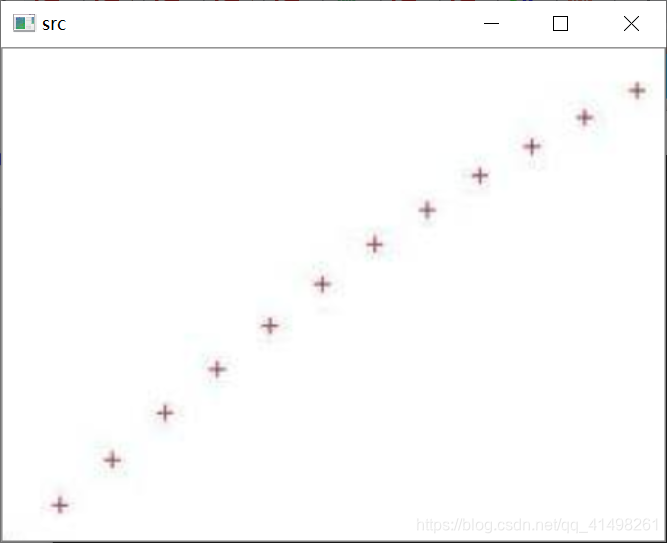
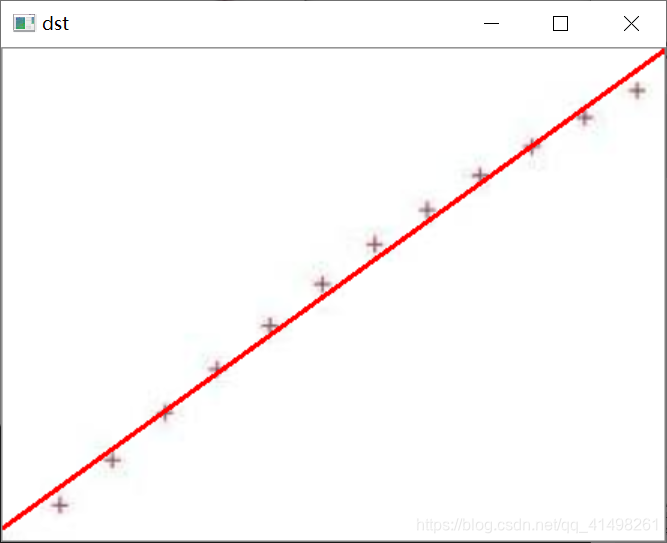
void findFitLine(Mat& src) {//1. 转化灰度图像Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);//2. 二值化Mat binary;threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);//3. 获得二维点集vector<Point> point_para;Point point_temp;for (size_t i = 0; i < src.rows; i++){for (size_t j = 0; j < src.cols; j++){if (binary.at<unsigned char>(i, j) < 255) {point_temp.x = j;point_temp.y = i;point_para.push_back(point_temp);}}}//4.直线拟合//拟合结果为4元素的容器,比如Vec4f-(vx,vy,x0,y0)//(vx、vy)是直线的方向向量//(x0、y0)是直线上的一个点Vec4f fitline;fitLine(point_para, fitline, DIST_L2, 0, 0.01, 0.01);//4.2 求出直线上的两个点double k = fitline[1] / fitline[0];Point p1(0, k * (0 - fitline[2]) + fitline[3]);Point p2(src.cols - 1, k * ((src.cols - 1) - fitline[2]) + fitline[3]);//4.3 显示拟合出的直线方程cout << "y-" << fitline[3] << "=" << k << "(x-" << fitline[2] << ")" << endl;line(src, p1, p2, Scalar(0, 0, 255), 2);imshow("dst", src);
}int main() {Mat src = imread("D:/test/fitline.png");if (src.empty()) {cout << " input the image error!" << endl;}imshow("src", src);findFitLine(src);waitKey(0);return 0;}
学习:
直线拟合——cv::fitLine()详解
【算法+OpenCV】基于opencv的直线和曲线拟合与绘制(最小二乘法)
opencv学习——最小二乘法拟合直线
OpenCV—直线拟合fitLine
【OpenCV3】直线拟合–FitLine()函数详解
这篇关于二值图像分析–直线拟合与极值点寻找的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





