本文主要是介绍【AI视野·今日Robot 机器人论文速览 第三十期】Thu, 14 Apr 2022,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
AI视野·今日CS.Robotics 机器人学论文速览
Thu, 14 Apr 2022
Totally 15 papers
👉上期速览✈更多精彩请移步主页
Interesting:
📚ViViD dataset, RGBD、红外、事件相机、IMU、Lidar、GPS,alternative vision sensors 可用于室外slam和三维重建(from KAIST)
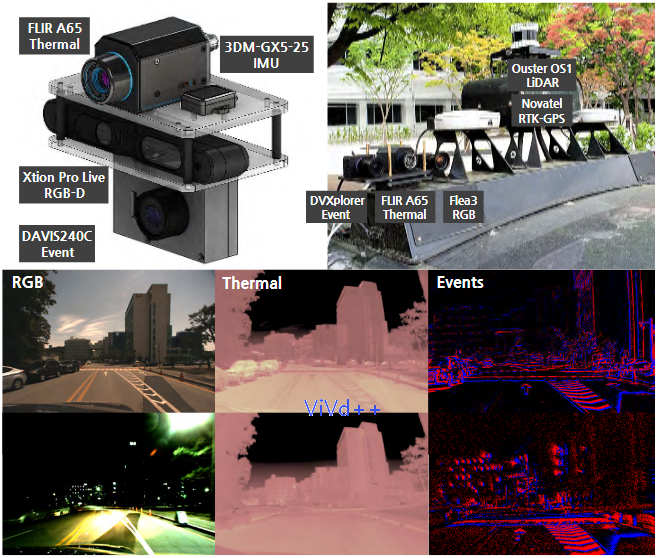
dataset:https://visibilitydataset.github.io/
Daily Robotics Papers
| Evolving Modular Soft Robots without Explicit Inter-Module Communication using Local Self-Attention Authors Federico Pigozzi, Yujin Tang, Eric Medvet, David Ha 机器人技术的模块化具有巨大的潜力。原则上,模块化机器人可以在不同的机器人中进行拆卸和重新组装,并可能执行新的任务。然而,实际利用模块化仍然是一个未解决的问题,控制器通常依赖于模块间通信,这种实际要求使得模块不能完全互换,从而限制了它们的灵活性。在这里,我们专注于基于体素的软机器人 VSR,即机械相同的弹性块的聚合。我们在每个体素内部使用相同的神经控制器,但没有任何体素间通信,因此模块化模块的理想条件都是平等和可互换的。我们通过进化计算优化了体素之间共享的神经控制器的参数。至关重要的是,我们在控制器内部使用本地自注意力机制来克服模块间通信通道的缺失,从而使我们的机器人真正由其模块的集体智能驱动。我们通过实验证明,由于自我注意,进化的机器人在运动任务中是有效的,同一机器人中包含的同一控制器的实例可以专注于不同的输入。 |
| A Systematic Comparison of Simulation Software for Robotic Arm Manipulation using ROS2 Authors Florent P. Audonnet, Andrew Hamilton, Gerardo Aragon Camarasa 仿真软件是机器人研究的强大工具,可以虚拟表示现实世界。然而,随着机器人操作系统 ROS 的兴起,出现了一些新的仿真软件包,这些软件包尚未在文献中进行比较。本文对与 ROS 版本 2 兼容的仿真软件进行了系统回顾。重点是机器人手臂操作的研究,因为它代表了工业中最常用的机器人应用及其未来对数字孪生的适用性。为此,我们因此在类似的参数、任务和场景下对模拟软件进行基准测试,并根据它们的长期运营能力、成功完成任务、可重复性和资源使用来评估它们。 |
| Single-grasp deformable object discrimination: the effect of gripper morphology, sensing modalities, and action parameters Authors Michal Pliska, Michal Mares, Pavel Stoudek, Zdenek Straka, Karla Stepanova, Matej Hoffmann 我们通过使用 4 个不同的机器人手抓手 Barrett 手 3 个可调节配置的手指、96 个触觉、8 个位置、3 个扭矩传感器、qb SoftHand 5 个手指、1 个电机、位置和电流反馈以及两个工业带有位置和力反馈的平行爪式机械手 Robotiq 2F 85 和 OnRobot RG6。使用了一组 9 个大小和刚度不同的普通物体和另一组极具挑战性的 20 个仅材料特性不同的聚氨酯泡沫。我们系统地比较了抓取器的性能,以及 1 种分类器 k NN、SVM、LSTM 对原始时间序列或特征的影响,2 种动作参数抓取配置和挤压速度,3 种感官模式的贡献。分类结果通过使用 PCA 的数据可视化得到补充。我们发现 i 所有的抓手,但 qb SoftHand 可以可靠地区分普通对象集 ii Barrett Hand 在泡沫 OnRobot RG6 约 75 和 Robotiq 2F 85 上达到约 70 的准确度 iii 在所有抓手、SVM over features 和 LSTM 在原始时间系列表现最好 iv 更快的压缩速度会降低分类性能 v 压缩速度之间的迁移学习对于 Barrett Hand 效果很好 只有在抓取配置之间的迁移是有限的 vi 消融实验提供了有趣的见解,有时单个感觉通道就足以进行区分。总体而言,巴雷特手作为一种复杂且昂贵的设备,具有丰富的感官反馈,提供了最好的结果,但没有触觉传感器的未校准的平行颚式夹持器可以仅基于位置和努力数据的单次抓取物体识别具有足够的性能。 |
| What Matters in Language Conditioned Robotic Imitation Learning Authors Oier Mees, Lukas Hermann, Wolfram Burgard 机器人技术的一个长期目标是制造能够通过其机载传感器获得并仅通过自然语言指定的感知来执行广泛的日常任务的机器人。虽然最近通过利用像素的端到端学习在语言驱动的机器人技术方面取得了重大进展,但由于设置的潜在变化,没有明确且易于理解的过程来进行各种设计选择。在本文中,我们对从离线自由形式模仿数据集中学习语言条件策略的最关键挑战进行了广泛的研究。我们进一步确定了提高性能的架构和算法技术,例如机器人控制学习的分层分解、多模态变压器编码器、离散的潜在计划和对齐视频和语言表示的自我监督对比损失。通过将我们的调查结果与我们改进的模型组件相结合,我们能够提出一种新颖的方法,该方法在具有挑战性的语言条件下的长视野机器人操作 CALVIN 基准测试中显着优于现有技术。我们已经开源了我们的实现,以促进未来的研究,以学习以自然语言指定的方式连续执行许多复杂的操作技能。 |
| Ada-Detector: Adaptive Frontier Detector for Rapid Exploration Authors Zezhou Sun, Banghe Wu, Chengzhong Xu, Hui Kong 在本文中,我们提出了一种基于自适应快速探索随机树 RRT 的有效边界检测方法,用于自主机器人探索。机器人在探索未知环境时可以实现实时增量边界检测。首先,我们的检测器通过感知周围环境结构自适应地调整 RRT 的采样空间。自适应采样空间可以根据环境结构大大提高RRT的成功采样率,即成功加入RRT树的样本数与尝试采样次数的比值,并控制RRT的扩展偏差。其次,通过生成非均匀分布的样本,我们的方法还解决了 RRT 在滑动窗口中的过采样问题,其中均匀随机采样会导致两个相邻滑动窗口之间的重叠区域过采样。这样,我们的检测器更倾向于在最新探索的区域进行采样,提高了前沿检测的效率,实现了增量检测。我们在三个模拟基准场景中验证了我们的方法。 |
| A Novel Quadratic Interpolated Beetle Antennae Search for Manipulator Calibration Authors Zhibin Li, Shuai Li, Xin Luo 在过去的几十年里,工业机械手在飞机制造和汽车制造等各个领域发挥着至关重要的作用。然而,未经标定的工业机械手绝对定位精度低,极大地限制了其在高精度智能制造中的应用。最近开发了机械臂校准方法来解决这个问题,但它们经常遇到长尾收敛和校准精度低的问题。为了解决这个棘手的问题,这项工作提出了一种新的机械手校准方法,该方法结合了扩展卡尔曼滤波器和二次插值甲虫天线搜索算法。本文有三点思路:a 提出一种新的二次插值甲虫天线搜索算法,以解决甲虫天线搜索算法中局部最优和收敛速度低的问题;b 采用扩展卡尔曼滤波算法抑制非高斯噪声;c 开发a新的机械手校准方法结合了扩展卡尔曼滤波器和二次插值甲虫天线搜索算法来校准机械手。 |
| An Advancing Ensemble with Diversified Algorithms for Robot Arm Calibration Authors Zhibin Li, Shuai Li, Xin Luo 近年来,工业机器人在智能制造中发挥着重要作用。因此,保证机器人具有较高的定位精度是当务之急。为了解决这个热点问题,提出了一种基于各种算法的强大集成的新型校准方法。本文有两个想法:开发八种校准方法来识别运动参数误差 2 建立有效的集成来搜索校准的运动参数。 |
| A New Robot Arm Calibration Method Based on Cubic Interpolated Beetle Antennae Search Approach Authors Zhibin Li, Shuai Li, Xin Luo 工业机器人手臂对于智能制造非常重要。工业机械臂普遍具有重复定位精度高的特点,而绝对定位精度低,极大地限制了其在汽车制造等高精度制造领域的应用。针对这一热点问题,本工作提出了一种基于三次插值甲虫天线搜索CIBAS的新型机械臂标定方法。本研究有三个想法:一是开发一种新的 CIBAS 算法,该算法可以有效解决甲虫天线搜索算法中的局部最优问题;二是利用粒子滤波器减少非高斯噪声的影响;三是提出一种结合 CIBAS 算法的新校准方法和粒子滤波器来搜索最佳运动学参数。 |
| First-Order Bilevel Topology Optimization for Fast Mechanical Design Authors Zherong Pan, Xifeng Gao, Kui Wu 拓扑优化 TO 在材料重量限制下最大限度地提高结构稳健性,正在成为机械零件自动设计的重要步骤。然而,现有的 TO 算法使用需要大量计算资源的有限元分析 FEA。我们提出了一种新的 TO 算法,该算法会产生更低的迭代成本。与需要在每次迭代中精确反转大型 FEA 系统矩阵的传统方法不同,我们将问题重新表述为可以使用一阶算法解决的双层优化,并且仅近似地反转系统矩阵。因此,我们的方法会产生较低的迭代成本,并且用户可以交互式地预览 TO 结果以快速更新设计。进行了理论收敛分析和数值实验来验证我们的有效性。 |
| ViViD++: Vision for Visibility Dataset Authors Alex Junho Lee, Younggun Cho, Young sik Shin, Ayoung Kim, Hyun Myung 在本文中,我们提出了一个数据集,该数据集捕获针对不同亮度条件的各种视觉数据格式。虽然 RGB 相机提供了丰富且直观的信息,但照明条件的变化可能会导致基于视觉传感器的机器人应用发生灾难性故障。克服照明问题的方法包括开发更强大的算法或其他类型的视觉传感器,例如热像仪和事件相机。尽管具有替代传感器的潜力,但具有替代视觉传感器的数据集仍然很少。因此,我们提供了从替代视觉传感器记录的数据集,通过手持或安装在汽车上,在相同的空间但在不同的条件下重复。我们的目标是从共同对齐的替代视觉传感器中获取可见信息。我们的传感器系统通过测量红外耗散量、结构化反射深度和亮度的瞬时时间变化,更独立于可见光强度收集数据。我们提供这些测量以及惯性传感器和地面实况,用于在光照条件差的情况下开发强大的视觉 SLAM。 |
| Task-Driven Data Augmentation for Vision-Based Robotic Control Authors Shubhankar Agarwal, Sandeep P. Chinchali 今天的机器人经常将数据驱动的感知和规划模型与基于经典模型的控制器连接起来。例如,无人机经常使用计算机视觉模型来估计由模型预测控制 MPC 跟踪的导航航路点。通常,这种学习到的感知规划模型会产生错误的航路点预测,从而增加了控制成本。然而,今天训练鲁棒感知模型的方法在很大程度上与任务无关,它们使用随机图像转换或单独针对视觉模型的对抗性示例来扩充数据集。因此,它们通常会引入最终对控制有益的像素扰动,而忽略那些最具对抗性的扰动。与先前为单步视觉任务合成对抗性示例的工作相比,我们的主要贡献是有效地为多步、基于模型的控制合成对抗性场景。为此,我们利用可微分 MPC 方法来计算基于模型的控制器对状态估计错误的敏感性,这反过来又指导我们如何合成对抗性输入。我们表明,与标准任务无关数据增强相比,在这些对抗性数据集上重新训练视觉模型将 OoD 测试场景的控制性能提高了 28.2。 |
| Self-Supervised Traffic Advisors: Distributed, Multi-view Traffic Prediction for Smart Cities Authors Jiankai Sun, Shreyas Kousik, David Fridovich Keil, Mac Schwager 联网和自动驾驶汽车 CAV 的部署越来越广泛,但目前尚不清楚如何最好地部署智能基础设施以最大限度地发挥其功能。一个关键挑战是确保 CAV 能够可靠地感知其他代理,尤其是被遮挡的代理。另一个挑战是希望智能基础设施能够自治并易于扩展到广域部署,类似于现代交通信号灯。目前的工作提出了自我监督交通顾问 SSTA,这是一种基础设施边缘设备概念,它利用自我监督视频预测与通信和协同训练框架相结合,从而能够自主预测整个智慧城市的交通。 SSTA 是一种静态安装的摄像头,可俯瞰复杂交通流的交叉路口或区域,将交通流预测为未来的视频帧,并学习与相邻的 SSTA 通信,以便在交通出现在视野 FOV 之前进行预测。所提出的框架旨在实现三个目标:1 设备间通信以实现高质量预测,2 可扩展到任意数量的设备,3 终身在线学习以确保适应不断变化的环境。 |
| Safer Autonomous Driving in a Stochastic, Partially-Observable Environment by Hierarchical Contingency Planning Authors Ugo Lecerf, Christelle Yemdji Tchassi, Pietro Michiardi 当学习在随机的、部分可观察的环境中行动时,智能代理应该准备好预测其对环境状态的信念的变化,并能够动态地调整其行动以适应不断变化的条件。作为人类,我们能够在学习一项任务时制定应急计划,其明确目标是能够纠正初始控制中的错误,因此,如果我们对环境的感知发生突然变化需要立即纠正,这将证明是有用的行动。 |
| Mixed-Integer Programming for Signal Temporal Logic with Fewer Binary Variables Authors Vince Kurtz, Hai Lin Signal Temporal Logic STL 为机器人和网络物理系统的复杂控制目标提供了一种方便的编码方式。 STL 轨迹合成的最新技术基于混合整数凸编程 MICP。 MICP 方法是健全和完整的,但由于二进制变量数量的指数复杂性,其可扩展性有限。在这封信中,我们为 STL 提出了一种更有效的 MICP 编码。我们的新编码基于这样的见解,即析取可以使用二进制变量的对数进行编码,而合取可以在没有二进制变量的情况下进行编码。我们在仿真示例中证明,我们提出的方法在长而复杂的规范方面明显优于现有技术。 |
| Swarm Modelling with Dynamic Mode Decomposition Authors Emma Hansen, Steven L. Brunton, Zhuoyuan Song 尽管通常是低维的紧急动态,但由于系统固有的高维,对生物或工程群进行建模具有挑战性。大多数现有的群体建模方法都基于第一原理,并且通常会导致群体特定的参数化不能推广到广泛的应用程序。在这项工作中,我们应用一种纯粹的数据驱动方法来 1 通过观察数据学习同质群体的局部交互,并使用学习模型生成类似的群体行为。特别是,在规范的 Vicsek 群模型上开发和测试了一个带控制的动态模式分解的修改版本,称为 swarmDMD。目标是使用 swarmDMD 来学习导致观察到的群体行为的代理间交互。我们表明 swarmDMD 可以忠实地重建群体动力学,并且 swarmDMD 学习的模型为数据外推提供了一个较短的预测窗口,并在预测精度和预测范围之间进行了权衡。我们还对不同观察数据类型对建模的功效进行了全面分析,我们发现代理间距离产生了最准确的模型。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com
这篇关于【AI视野·今日Robot 机器人论文速览 第三十期】Thu, 14 Apr 2022的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








