robot专题

Robot Operating System——加速度信息
大纲 应用场景1. 机器人运动控制场景描述具体应用 2. 传感器数据处理场景描述具体应用 3. 状态估计场景描述具体应用 4. 物体运动分析场景描述具体应用 5. 机器人仿真场景描述具体应用 定义字段解释 案例 geometry_msgs::msg::Accel 是 ROS 2 中的一个消息类型,用于表示加速度信息,包括线性加速度和角加速度。它通常用于机器人导航、控制和运动规划等场

CodeForces 321 A - Ciel and Robot
【题目链接】:click here~~ 【题目大意】:一个robot 机器人 ,可以根据给定的指令行动,给你四种指令,robot初始位置是(0,0),指令一出,robot会重复行动,判断能否在无限行动的情况下经过点(n,m)。 【解题思路】其实仔细模拟一下,可以发现是有周期的,判断即可,见代码吧~~ 代码: #include <iostream>#include <algorithm

ROS 2(Robot Operating System 2)示例项目代码
一个简单的ROS 2(Robot Operating System 2)示例项目代码,这个项目将包括两个节点:一个发布者(Publisher)节点和一个订阅者(Subscriber)节点。在这个例子中,发布者节点将周期性地发布一个字符串消息,而订阅者节点将接收这个消息并打印出来。 第一步:创建ROS 2工作空间 首先,你需要有一个ROS 2环境设置好。然后,你可以创建一个新的工作空间并初始化它
Robot Operating System——距离传感器数据
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::Range 是 ROS (Robot Operating System) 中的一个消息类型,用于表示距离传感器(如超声波传感器、激光测距仪等)的测量数据。它包含了距离测量值以及传感器的相关信息。 应用场景 机器人导航 避障:在机器人导航中,距离传感器可以用于检测前方的障碍物。通过发布 Range 消息,机器

Robot Operating System——自定义Service/Client通信消息结构
大纲 初始化环境生成自定义服务的工程创建包自定义消息package.xml完整文件 CMakeLists.txt完整文件 编译注册 使用自定义服务的工程创建包代码CMakeLists.txt编译运行 工程地址参考资料 在《Robot Operating System——自定义订阅/发布的消息结构》一文中,我们讲解了如何自定义消息结构。这个消息是发布者向订阅者发送的消息,具有单向性。
Robot Operating System——多个自由度的关节状态信息
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::MultiDOFJointState 是 ROS (Robot Operating System) 中的一个消息类型,用于表示具有多个自由度(Degrees of Freedom, DOF)的关节状态。它通常用于传输和处理机器人中复杂关节的状态信息。 应用场景 机器人控制 多自由度机械臂:在多自由度机械臂中

Robot Operating System——创建可执行文件项目的步骤
大纲 初始化环境创建Package代码添加依赖(package.xml)修改编译描述find_package寻找依赖库指定代码路径和编译类型(可执行文件/动态库)链接依赖的库完整文件 编译测试总结参考资料 之前我们看到ROS2中,有的Node的实现逻辑存在于动态库中,而动态库又有隐式加载和手动加载等几种模式。这些例子都比较复杂。本文将介绍如何从0到1创建一个最简单的工程,其Node

setting up your robot with tf(二)
1,using the robot state publisher on your own robot 上面一节是使用TF树结构来表示不同的框架之间的关系,且这棵TF转换树是一棵单遍历的树,表示了不同框架之间的关系,我们写了一个节点,用来定义两个框架的关系,这样下次使用就能自动调用这种关系,这样tf就帮我们做了很重要的一份工作。这一节我们学习robot state publisher。当我们的机

setting up your robot with tf(一)
1,setting up your robot using tf 官网学习http://wiki.ros.org/tf/Tutorials 2,transform configuration Many ROS packages require the transform tree of a robot to be published using thetf software libra
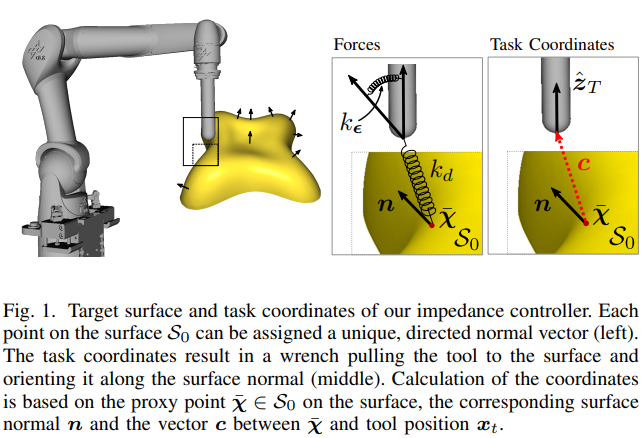
Contact-Rich Robot ManipulationTask:grinding and Peg-in-Hole Assembly
Contact-Rich Robot Manipulation Task涵盖了多种需要机器人与环境或物体进行密切接触的复杂操作。 1. Grinding(研磨) 任务描述:研磨是制造业中常见的加工过程,涉及使用研磨工具去除材料表面的一层或多层,以达到预定的形状、尺寸或表面光洁度。在机器人研磨任务中,机器人需要精确控制其末端执行器(如研磨头)的运动,以确保在工件上施加正确的力和速度。挑战: 精确

Robot Framework完整流程学习系列一
一.环境搭建 网上有很多的教程,这里就不多讲了 二.RIDE的界面认识 这里只介绍几个重要常用的功能,其他相信自己都能理解 1.Search Keywords(F5): 搜索关键字 2.ContentAssistance:内容助手 3.ViewRIDELog:查看RIDE日志,使用过程
Robot Operating System (ROS)中,发布与订阅
在Robot Operating System (ROS)中,发布与订阅是一种基于主题的异步消息传递机制,用于节点间的通信。ROS的设计是围绕着这一概念,它允许不同节点之间解耦,每个节点专注于自己的任务,通过发布和订阅消息来与其他节点交互。 ### 发布者 (Publisher) 发布者是向特定主题发送消息的节点。这些消息可以是传感器读数、控制指令、状态更新等。发布者不需要知道谁(如果有
hdu 5449 Robot Dog(期望+lca)
hdu 5449 Robot Dog(期望+lca) 题目链接:hdu 5449 Robot Dog 解题思路 n有50000,询问次数有100,每次询问的路径点数最多有100,对于不同询问去做动态规划,开一个 dp[u][i] dp[u][i]表示在第u个节点匹配了i个的期望,显然最坏情况下dp数组的每个状态都要遍历到,复杂度为 o(nqp) o(nqp),不能接受。 换个想法,如果我们
HDU 5007 Post Robot(西安网络赛A题)
HDU 5007 Post Robot 题目链接 就一个签到题,今天也是手速略慢 代码: #include <cstdio>#include <cstring>#include <cstdlib>#include <iostream>#include <map>#include <vector>#include <set>#include <string>#i

【测试】保姆级Robot Framework教程,学会轻松做自动化测试
文章目录 前言环境搭建下载、安装Python 3.x安装robotframework库安装requests库安装selenium2library库 关键字参数系统关键字自定义关键字 搭建测试框架创建测试用例执行测试用例生成测试报告结尾语 前言 大家好,我是洋子,今天给大家分享一下Robot Framework自动化测试框架的使用教程,Robot Framework是一个可扩展、
HDU 4576 Robot
//题目并不算难,但是特么的就是坑死你。。。 //用数组a[]维护每轮的结果,a[i]就是代表走到i的概率。。。还需借助辅助数组q[]。 #include<stdio.h> #include<string.h> #define max 205 int n,m,l,r; double q[max],a[max]; int main(){ while(scan
了解 Robot Framework :接口自动化测试教程!
开源自动化测试利器:Robot Framework Robot Framework 是一个用于实现自动化测试和机器人流程自动化(RPA)的开放源代码框架。它由一个名为 Robot Framework Foundation 的组织得到推广,得到了多家领军企业在软件开发中的广泛应用。框架以其开放性和灵活性为特点,能够无缝整合各种其他工具,无论团队规模大小,均无需承担额外许可成本。 该框架

#####好好好好###### 什么是我所说的 Conversational Robot
包括 Dialogue System, QA System, Chatbot 简述。 下面大部分文字是整体的介绍,当然要完全把这三个部分都详细说完,可能就够一本书了,没几百篇论文的阅读出不来。 主要是因为每个系统的每个实现方法经常都是独立的一个领域,而很少有介绍完整成品的东西,也几乎没有完整的书籍。 Conversational Robot 的来历 主要是为了避免dialogue和chat这两
一文2500字Robot Framework自动化测试框架超强教程
1、Robot Framework简介 Robot Framework是一个基于Python的可扩展关键字驱动的自动化框架,用于验收测试,验收测试驱动开发(ATDD),行为驱动开发(BDD)和机器人流程自动化(RPA)。它可以用于分布式异构环境,其中自动化需要使用不同的技术和接口。由Robot Framework基金会支持。许多行业领先的公司在其软件开发中使用该工具。 Robot Fram
JAVA机器人ROBOT
从jdk1.3开始,提供了一个Robot类,在Java.awt.*包下面。这个类在jdk中描述如下: 此类用于为测试自动化、自运行演示程序和其他需要控制鼠标和键盘的应用程序生成本机系统输入事件。Robot 的主要目的是便于 Java 平台实现自动测试。 使用该类生成输入事件与将事件发送到 AWT 事件队列或 AWT 组件的区别在于:事件是在平台的本机输入队列中生成的。例如,Robot.

robot_localization包的使用
robot_localization包没有限制传感器的数据输入。 支持的状态估计节点数据类型: • nav_msgs/Odometry • geometry_msgs/PoseWithCovarianceStamped • geometry_msgs/TwistWithCovarianceStamped • sensor_msgs/Imu 状态向量:[x y z α β γ x˙ y˙ z˙
POJ1573 ZOJ1708 UVA10116 UVALive5334 HDU1035 Robot Motion【模拟】
Robot Motion Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 16166 Accepted: 7643 Description [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0K1yHoGJ-1614299697840)(http://poj.org/images/1573_1.jpg
Codeforces Contest 1073 problem C Vasya and Robot —— 尺取
Vasya has got a robot which is situated on an infinite Cartesian plane, initially in the cell (0,0). Robot can perform the following four kinds of operations: U — move from (x,y) to (x,y+1); D — move

Codeforces 1253 F. Cheap Robot —— 想法,dijkstra+kruskal重构树+并查集+树链剖分+lca,有丶东西
This way 题意: 给你一张大小为n的图,并且点1~k是充电站。有q个询问,每次询问你从a走到b最少需要的电池大小为多少。 假设你当前电量为c,当走过一个权值为w的边时,你的点会变成c-w,如果这个点是充电站,那么你的电量会便会变回电池容量。 问你你每次需要的电池容量最小是多少。 题解: 有一说一,这道题很厉害。 首先先用dijkstra找到每个点距离它最近的充电站的距离,然后的话
自动化测试框架Robot Framework入门
什么是RF RF是一个基于 Python 的、可扩展的关键字驱动的自动化 验收测试框架、验收测试驱动开发 (ATDD)、 行为驱动开发 (BDD) 和机器人流程自动化 (RPA)。它 可用于分布式、异构环境,其中自动化 需要使用不同的技术和接口。 该框架周围有一个丰富的生态系统,由各种通用 作为单独项目开发的库和工具。查看更多 有关机器人框架和生态系统的信息,请参阅 http://robotf
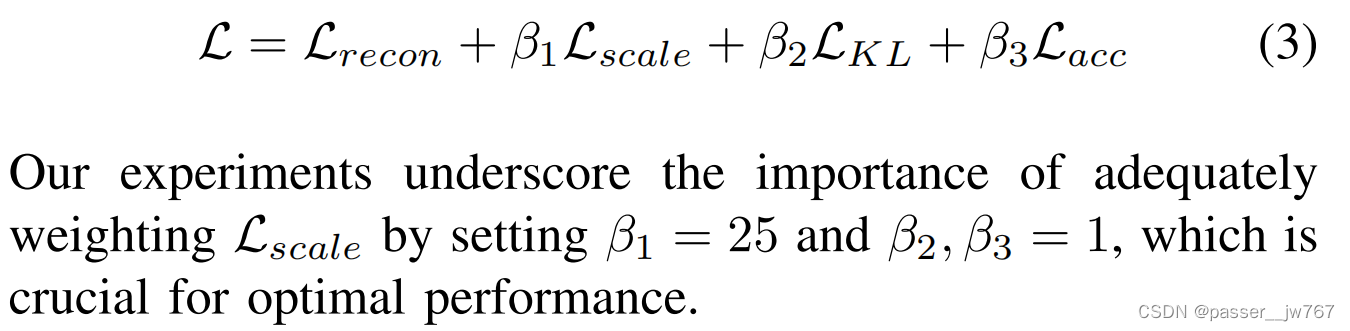
【计算机图形学】General Flow as Foundation Affordance for Scalable Robot Learning
对General Flow as Foundation Affordance for Scalable Robot Learning的简单理解 文章目录 1. 做的事2. 作为Affordance的General Flow2.1 General Flow Affordance2.2 General Flow属性 3. 智能体不可知的和规模感知的General Flow预测3.1 Genera