本文主要是介绍cadence virtuoso PEX 寄生参数提取及后仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
寄生参数提取

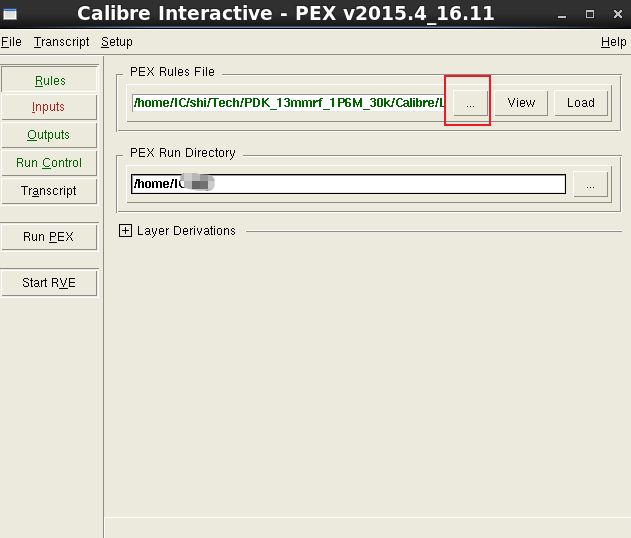
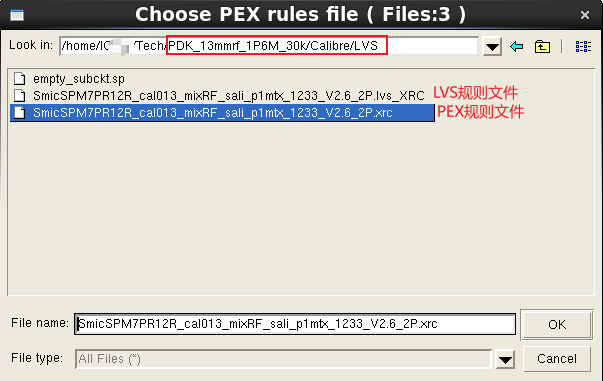
加载xrc文件,在这个工艺库中这个规则文件是在LVS文件夹中
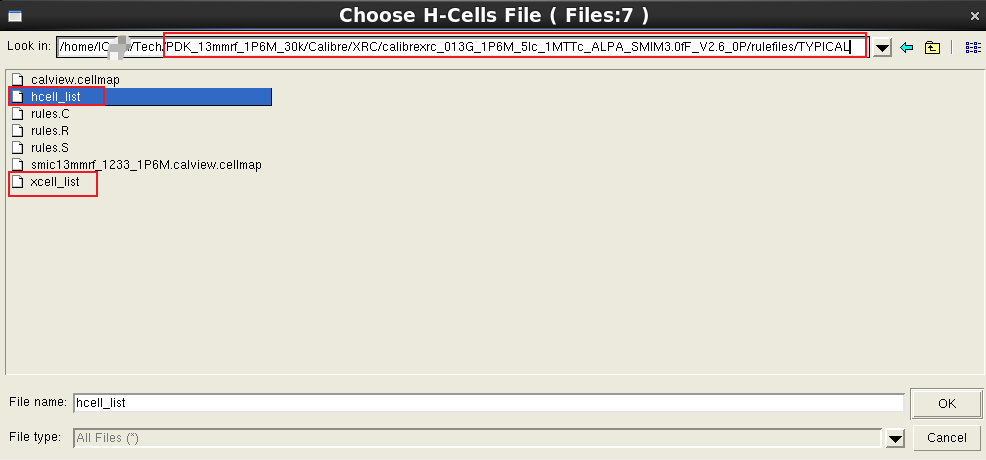
加载H-Cells文件和X-Cells文件

调出PEX options窗口

在Ground node name输入原理图中的地线名称
(如果这里无法输入,请参考:Cadence virtuoso drc lvs pex 无法输入-CSDN博客)

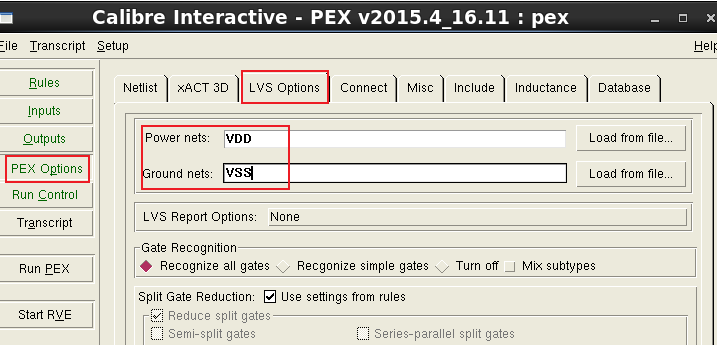
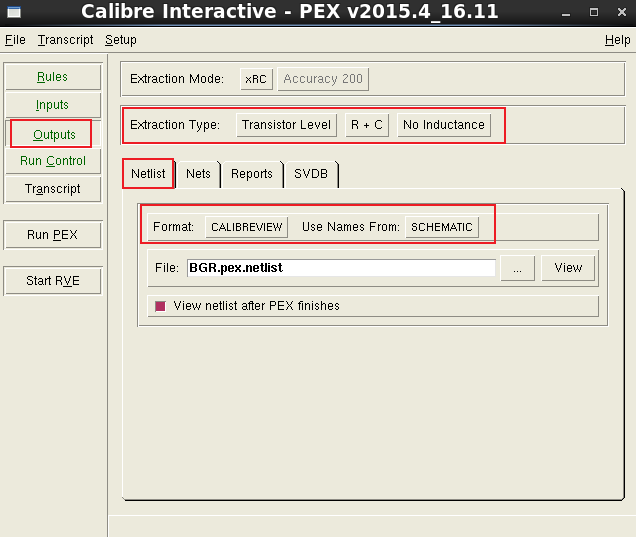
点击run PEX
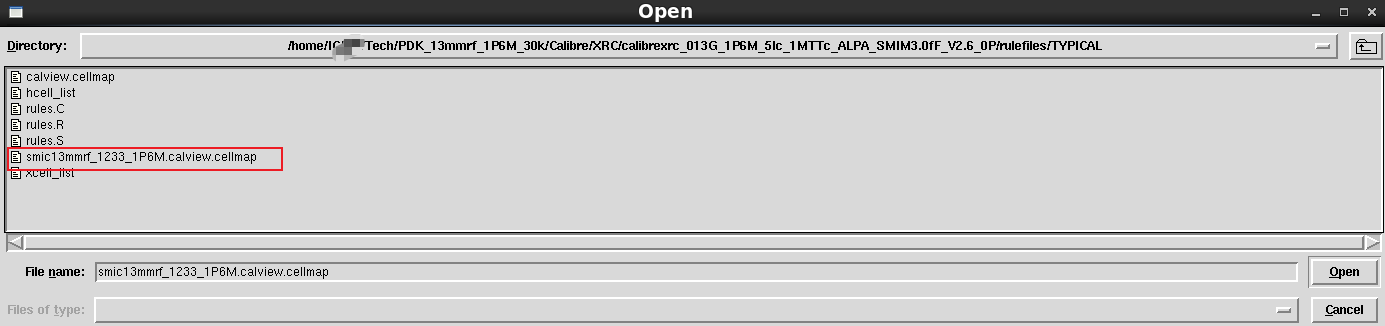
Cellmap file选择calview.cellmap文件,位置下一张图标出来了。
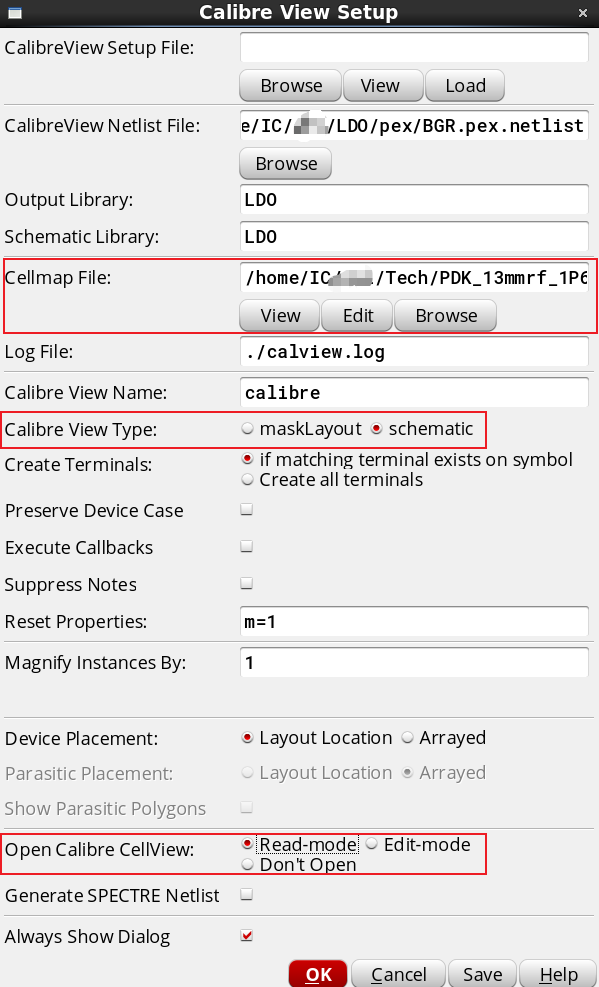
这个工艺库下貌似要选择smic13mmf_1233_1P6M.calview.cellmap文件而不是calview.cellmap文件。(选择calview.cellmap文件跑的时候会报error:ERROR: Could not find cell mapping for device parasitic_nwd. Ignoring instance)
此处如果出现calibre View generation encountered a fatal Error,参考:
cadence virtuoso寄生参数提取问题-CSDN博客
map calibre device 选择映射的器件,analogLib下的res和cap,点击auto map pins,点击ok


打开生成的calibre文件,就可以看到寄生参数提取出来的电阻电容

后仿真
后仿真(注意:后仿的testbench里面器件是刚刚经过寄生参数提取的那个CELL里面的schematic,如果最开始的CELL复制了多个,这里需要注意一下,别搞混了)
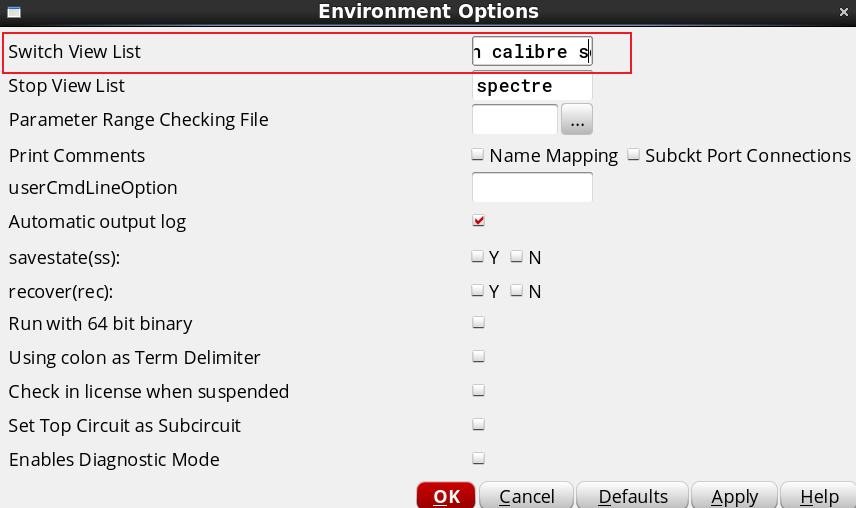
打开ADE L
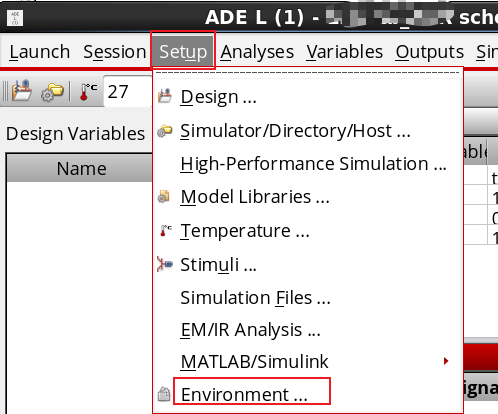
在红框栏里面的schematic前面加 calibre
这篇关于cadence virtuoso PEX 寄生参数提取及后仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



