本文主要是介绍2018年高教社杯全国大学生数学建模竞赛题目问题B 智能RGV的动态调度策略,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
问题B 智能RGV的动态调度策略
图1是一个智能加工系统的示意图,由8台计算机数控机床(Computer Number Controller,CNC)、1辆轨道式自动引导车(Rail Guide Vehicle,RGV)、1条RGV直线轨道、1条上料传送带、1条下料传送带等附属设备组成。RGV是一种无人驾驶、能在固定轨道上自由运行的智能车。它根据指令能自动控制移动方向和距离,并自带一个机械手臂、两只机械手爪和物料清洗槽,能够完成上下料及清洗物料等作业任务(参见附件1)。
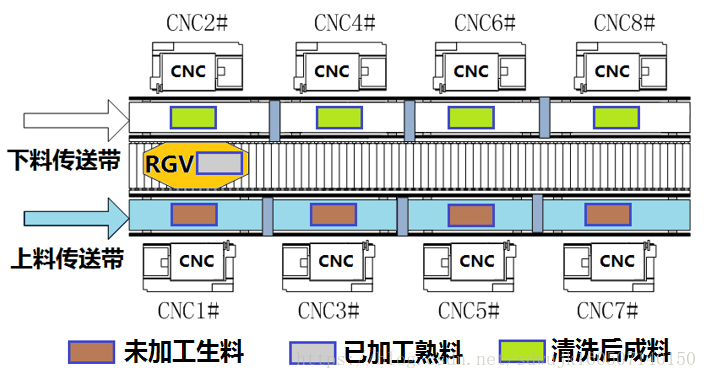
图1:智能加工系统示意图
针对下面的三种具体情况:
(1)一道工序的物料加工作业情况,每台CNC安装同样的刀具,物料可以在任一台CNC上加工完成;
(2)两道工序的物料加工作业情况,每个物料的第一和第二道工序分别由两台不同的CNC依次加工完成;
(3)CNC在加工过程中可能发生故障(据统计:故障的发生概率约为1%)的情况,每次故障排除(人工处理,未完成的物料报废)时间介于10~20分钟之间,故障排除后即刻加入作业序列。要求分别考虑一道工序和两道工序的物料加工作业情况。
请你们团队完成下列两项任务:
任务1:对一般问题进行研究,给出RGV动态调度模型和相应的求解算法;
任务2:利用表1中系统作业参数的3组数据分别检验模型的实用性和算法的有效性,给出RGV的调度策略和系统的作业效率,并将具体的结果分别填入附件2的EXCEL表中。
表1:智能加工系统作业参数的3组数据表 时间单位:秒
| 系统作业参数 | 第1组 | 第2组 | 第3组 |
| RGV移动1个单位所需时间 | 20 | 23 | 18 |
| RGV移动2个单位所需时间 | 33 | 41 | 32 |
| RGV移动3个单位所需时间 | 46 | 59 | 46 |
| CNC加工完成一个一道工序的物料所需时间 | 560 | 580 | 545 |
| CNC加工完成一个两道工序物料的第一道工序所需时间 | 400 | 280 | 455 |
| CNC加工完成一个两道工序物料的第二道工序所需时间 | 378 | 500 | 182 |
| RGV为CNC1#,3#,5#,7#一次上下料所需时间 | 28 | 30 | 27 |
| RGV为CNC2#,4#,6#,8#一次上下料所需时间 | 31 | 35 | 32 |
| RGV完成一个物料的清洗作业所需时间 | 25 | 30 | 25 |
注:每班次连续作业8小时。
想要资源的请关注公众号: 在一起的足球

自动获取资源和数十种经典算法,帮助各位提升自己
附件1:智能加工系统的组成与作业流程
这篇关于2018年高教社杯全国大学生数学建模竞赛题目问题B 智能RGV的动态调度策略的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







