本文主要是介绍带视觉ABB机器人西门子PLC立库码垛机伺服 SCL和梯形图混编,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
带视觉ABB机器人西门子PLC立库码垛机伺服
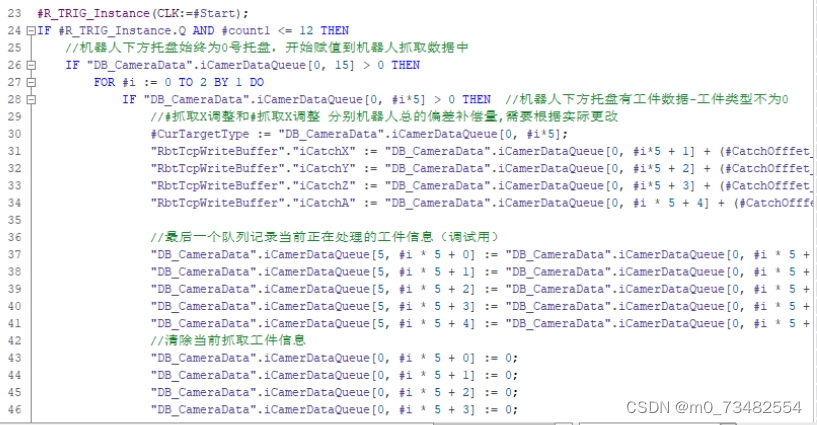
SCL和梯形图混编,经典程序,知识点丰富
包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序
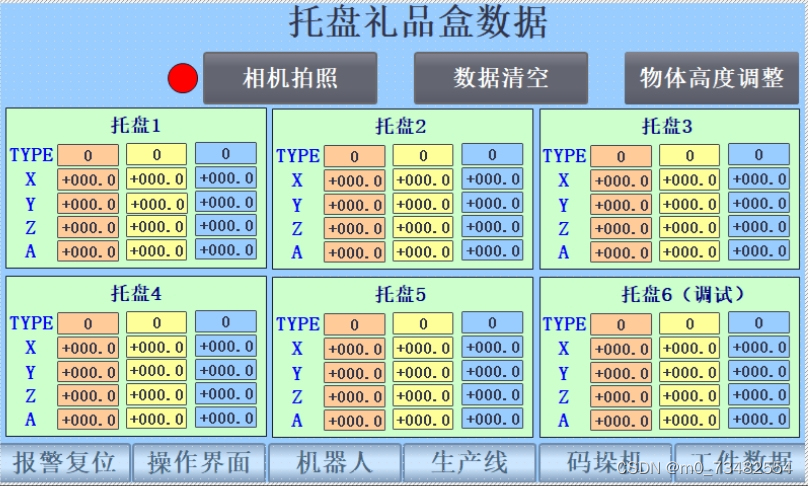
PLC和基恩士相机视觉定位MODBUS TCP通讯 (SCL)
PLC和ABB机器人通讯MODBUS 通讯(SCL)
PLC和码垛机MODBUS通讯(SCL)
PLC和4 台西门子变频器G120profinet通讯
1个伺服轴

ID:277632998988375 精品工控211
精品工控211





这篇关于带视觉ABB机器人西门子PLC立库码垛机伺服 SCL和梯形图混编的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









