伺服专题
V90总线伺服报800F错误
1、博途PLC工艺对象位置轴轴控功能块 博途PLC工艺对象位置轴轴控功能块(完整SCL代码)-CSDN博客文章浏览阅读423次。S7-1200PLC脉冲轴位置轴位置控制功能块S7-1200PLC脉冲轴位置轴位置控制功能块优化(完整SCL源代码)_s71200 脉冲轴-CSDN博客文章浏览阅读341次。该博客详细介绍了如何优化S7-1200 PLC的位置控制功能块,使得在轴激活限位时无需复位即可直

发那科A06B-6270-H045#H600 主轴伺服放大器
发那科主轴伺服放大器是FANUC数控系统中重要的组成部分,用于驱动和控制主轴电机,实现精确的速度和位置控制。以下是关于发那科主轴伺服放大器的一些重要说明和注意事项: 标准设置和电缆连接:更换有故障的伺服放大器后,需要进行一些标准设置和调整。在维护时,如果需要触摸伺服放大器,例如进行维护,那么需要事先确认下图所示的2根螺杆上的剩余电压不超过50V。伺服放大器的规格型号和连接方法可以参考相
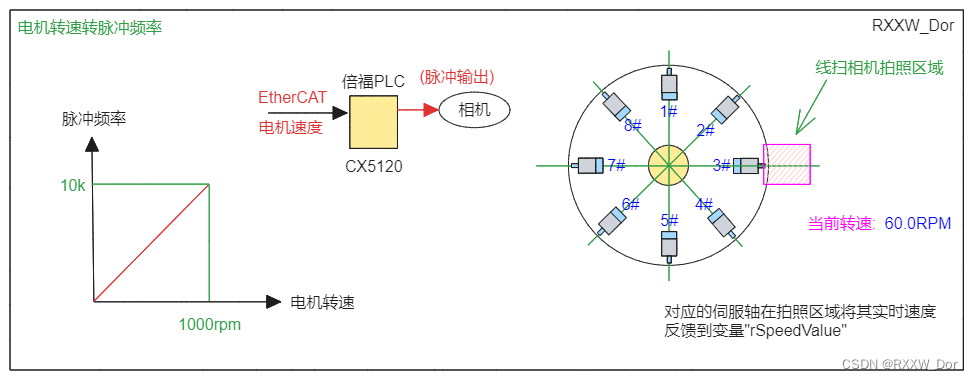
视觉应用线扫相机速度反馈(伺服转盘)
运动控制实时总线相关内容请参考运动控制专栏,这里不再赘述 1、运动控制常用单位u/s运动控制单位[u/s]介绍_运动控制 unit是什么单位-CSDN博客文章浏览阅读176次。运动控制很多手册上会写这样的单位,这里的u是英文单词unit的缩写,也就是单位的意思,所以这里的单位不是微米/秒,也不是毫米/秒,这里是一个泛指,当我们的单位选择脉冲时,它就是脉冲/秒,也就是我们说的频率(HZ)。常用脉冲
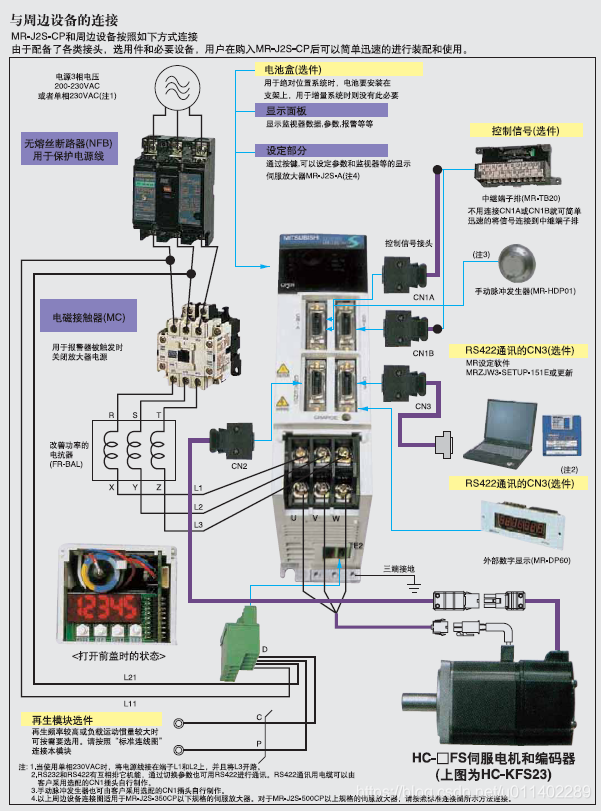
三菱伺服 MR-J2S产品样本
你还在为安装自动化软件发愁吗?请加WX:HFTC7003 移动硬盘: 品牌东芝 1TB内存, 硬盘里面是操作系统不要删除,以免无法启动操作系统。 可以在硬盘里面单独建一个文件夹,存放资料。 本操作系统是win 7 64位 第一次使用注意事项: 1、把电脑的第一启动项设置成USB启动,不同电脑有不同方式,具体百度。 2、插入硬盘,打开电脑,等待加载,输入密码。 3、使用驱

<PLC><汇川><伺服>汇川SV630N伺服驱动使用转矩模式时报错E234.0的一种解决办法
前言 本文是使用汇川SV630N,进行EtherCat通讯,使用转矩模式时,当希望电机反向时电机会报错的一种解决办法。 错误代码 PLC端添加EtherCat轴,并编写控制指令,使用mc轴控指令: 当设定了目标力矩、力矩斜坡以及限制速度后,触发指令块,伺服会驱动电机进行运动。 在电机空载时,反馈的力矩是无法达到目标力矩的,此时给电机添加负载,目标力矩即可达到。 但是,如果向反方向快速拖动,造成

艾斯迪克Z40系列AC伺服拧紧系统说明
艾斯迪克手持式拧紧机采用先进的扭矩控制技术,能够实现高精度的扭矩控制,确保螺栓和螺母的连接安全可靠。该产品具有体积小、重量轻、操作简单的特点,适用于多种工作环境。 ESTIC专利技术ESTIC PULSE是一种减少拧紧螺丝时反作用力的技术。该技术可在不承受反作用力的情况下实现安全、高精度的拧紧。符合人体工程学设计的手动螺母扳手减少了螺丝拧紧时的负担。 子锐机器人常见ESTIC伺服拧紧
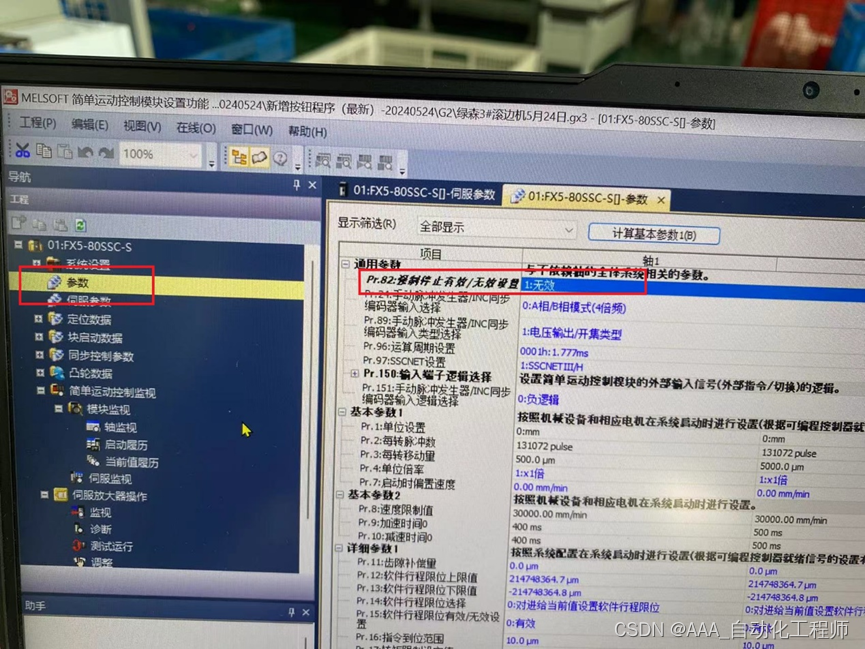
三菱MR-J4系列伺服驱动器E7.1和32.3故障报警处理总结
三菱MR-J4系列伺服驱动器E7.1和32.3故障报警处理总结 三菱MR-J4系列伺服驱动器出现报警,故障代码为:E7.1和32.3,查阅手册可以看到E7.1和32.3的报警解释信息, 如下图所示,此时简单运动控制模块上的ERROR灯亮, 如下图所示,用GX WORKS3打开备份程序,找到FX5-80SSC-S模块,双击打开参数—找到Pr82,此处应设置为“无效”, 如下图所示

Kinetix5700罗克韦尔AB伺服驱动器维修2198-D020-ERS3
Allen-Bradley罗克韦尔运动控制/伺服驱动器维修Kinetix 5700/Kinetix 6000/Kinetix 5500等系列电机驱动器/运动控制系统维修。 AB驱动器的控制接口有两种类型: 类型1:脉冲接口 类型2:模拟量接口 大部分小型PLC和伺服驱动器的链接方式都是开环控制模式 ab伺服驱动器是一种控制电机转速和位置的设备。其主要作用就是根据输入指令实现电机控制,在
西门子CPU与汇川伺服通信与控制
西门子CPU与汇川620F伺服通信与控制 一、西门子CPU与汇川620F伺服通信与控制1、器件准备2、==伺服软件设置==3、==PLC添加汇川伺服描述文件==4、PLC编程调试5、总结 二、西门子s7-1500限位信号接到伺服的方法1、==通过默认报文获取限位信号==2、==添加自定义报文获取限位信号==3、总结 三、西门子S7-1500自带模拟量控制伺服转速 一、西门子CPU与

YAW-2000D微机控制电液伺服压力试验机
一、简介 微机控制电液伺服压力试验机主要用于砖、石、水泥、混凝土等材料的抗压强度试验,广泛应用于建筑行业和检测单位,也可用于其他材料的抗压性能试验。测控系统采用高精度数字伺服阀,具有力闭环控制功能,能够实现等载荷速率加载或等应力速率加载,控制精度高,可靠性好,采用微机实现电子测量、自动完成抗压强度试验,自动计算和打印报告。 主要性能技术指标 名称 参数 备注 精度 0.5级

汇川AM400PLC通过EtherCAT总线控制禾川X3E伺服使能和点动控制
进行通信之前需要安装禾川X3E的XML文件,具体方法如下: 1、汇川AM400PLC和X3E通信配置 汇川AM400PLC和禾川X3E伺服EtherCAT通信-CSDN博客文章浏览阅读29次。1、汇川H5UPLC和X3E伺服EtherCAT总线控制汇川H5U PLC通过EtherCAT总线控制SV660N和X3E伺服_伺服驱动器 ethercat csdn 汇川-CSDN博客。https://
PCI-8134A.dll 入门级4轴伺服和步进运动控制卡与PCI-DASK.DLL
PCI-8134A 入门级4轴伺服和步进运动控制卡 8134A.dll(ADLINK—凌华科技) PCI-DASK.DLL //DASK Data Types typedef unsigned char U8; typedef short I16; typedef unsigned short U16; typedef long I32; ty

MR-JE-70A 三菱MR-JE伺服驱动器(750W通用型)
三菱MR-JE伺服驱动器(750W通用型) MR-JE-70A外部连接,MR-JE-70A用户手册,MR-JE-70A 三相或单相AC220V三菱通用型伺服放大器750W,配套电机HG-SN52J-S100、HG-KN73J-S100。 MR-JE-70A参数说明:伺服驱动器通用型750W,三相或单相AC200V~240V 三菱伺服驱动器MR-JE-70A产品规格说明: [输出额定电压]

关于伺服驱动器速度环、位置环参数调整的原则
伺服电机使用效果如何,除了与电机和驱动器的性能有关外,驱动器参数的调整也是一个十分关键的因素。 伺服驱动器主要的性能参数调整有三个:速度环比例增益、速度环积分时间常数、位置环比例增益。 为什么要对速度环参数进行调节: 速度环比例增益、积分时间常数仅对电机在运行时(有速度)起作用。速度环比例增益的大小,影响电机速度的响应快慢,速度环积分时间常数的大小,影响电机稳态速度误差的大小及速度环系统的稳定性

硬件FOC伺服控制芯片TMC4617适应永磁同步伺服/直流无刷伺服/直流有刷伺服/闭环步进/音圈电机
硬件FOC伺服控制芯片TMC4617适应永磁同步伺服/直流无刷伺服/直流有刷伺服/闭环步进/音圈电机 全球领先的嵌入式运动控制公司德国TRINAMIC MOTION CONTROL 将于近期推出其最新的伺服控制芯片TMC4671 TMC4671是一款完全集成伺服控制芯片,为直流无刷电机、永磁同步电机、2相步进电机、直流有刷电机和音圈电机提供磁场定向控制。 所有的控制功能都被集成在硬件上。
S7-1200PLC控制V90伺服通过FB284实现位置控制的方法
S7-1200PLC控制V90伺服通过FB284实现位置控制的方法 通过西门子报文111和FB284功能块 在V-ASSISTANT中将V90 PN设置控制模式为"基本位置控制(EPOS)" V90 PN与PLC采用PROFINET RT通信方式并使用西门子报文111。 在博途中V90 PN的设备视图中更改报文为:报文111 安装博图FB284库文件,若有需要可从以下链接获取:
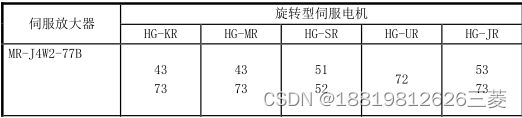
MR-J4W2-77B 三菱伺服放大器2轴一体(750W型)
MR-J4W2-77B 三菱伺服放大器2轴一体(750W型) MR-J4W2-77B用户手册、MR-J4W2-77B外部连接 MR-J4W2-77B参数说明:2轴一体SSCNETⅢ/H接口型、0.75kW用、三相或单相AC200V~240V 三菱伺服放大器MR-J4W2-77B的详细规格说明: [输出] . 额定电压:三相AC 170V . 额定电流:5.8A [主电路电源输入
机电一体化系统设计学习笔记——伺服驱动技术与控制技术
一、伺服驱动装置 1. 任务 精确控制:伺服驱动装置的首要任务是实现对机械系统的精确控制,包括位置、速度、加速度等参数的精准调节和控制。快速响应:具备快速响应能力,能够在短时间内实现目标位置或速度的调整。稳定性:保持系统运行稳定,防止震动、振动等不稳定因素影响系统性能。 2.类型 伺服电机:常用伺服电机作为驱动源,包括伺服直流电机和交流伺服电机等。伺服控制器:用于控制伺服电机的位置、速度和

【原创教程】EPLAN中伺服的制图方法
首先在EPLAN里制作伺服之前,需要有伺服的手册,根据手册里的各个引脚号的说明来制图,这里我们讲解西门子和三菱这两种品牌型号的。 1、下图是西门子的伺服,型号为:6SL3040-1LA01-0AA0 2、第一步我们需要绘制出黑盒来表示伺服的整体外框 选择插入—盒子—黑盒 3、在图纸中单击绘制出 选择图形右击属性—修改设备标识符—添加部件—确定


KEBA HT401-222-8/0伺服控制器
KEBA HT401-222-8/0伺服控制器具有以下特点: 高精度和高响应速度:该控制器采用先进的控制算法和技术,能够实现高精度和高响应速度的伺服控制。多种控制模式:该控制器支持多种控制模式,如位置控制、速度控制、扭矩控制等,以满足不同应用场景的需求。易于编程和调试:该控制器提供丰富的编程接口和调试工具,方便用户进行二次开发和调试。可靠性高:该控制器采用高品质的材料和制造工艺,经过严格的质量控

EtherCAT 开源主站 IGH 在 linux 开发板的移植和伺服通信测试
手边有一套正点原子linux开发板imax6ul,一直在吃灰,周末业余时间无聊,把EtherCAT的开源IGH主站移植到开发板上玩玩儿,搞点事情做。顺便学习研究下EtherCAT总线协议及其对伺服驱动器的运动控制过程。实验很有意思,这里总结下实验过程,分享给有需要的小伙伴。 前言 igh EtherCAT Master是一个用于控制EtherCAT网络的软件模块,它提供了主站功能。主站负
EtherCAT开源主站 IGH 介绍及主站伺服控制过程
目录 前言 IGH EtherCAT主站介绍 主要特点和功能 使用场景 SOEM 主站介绍 SOEM 的特点和功能 SOEM 的使用场景 IGH 主站 和 SOEM对比 1. 功能和复杂性 2. 资源消耗和移植性 3. 使用场景 EtherCAT 通信原理 EtherCAT主站控制伺服过程 位置规划模式 原点复归模式 PLC与从站伺服驱动器的控制 软件主站与从站

LabVIEW电液伺服作动器
LabVIEW电液伺服作动器 随着工业自动化技术的快速发展,电液伺服作动器在各类精密控制领域得到了广泛应用。基于CRIO架构,利用LabVIEW软件开发了一套电液伺服作动器测控系统,实现了高精度的位移同步控制与测量,有效提高了系统的控制精度和运行安全。 项目背景 在高端装备制造和测试领域,对作动器控制精度和稳定性的要求日益增高。传统的电液伺服作动器控制系统存在控制精度不高、稳定性差等问题,迫

控制威格士伺服阀放大器SM4-15、SX4-10、SX4-12
威格士的SM4-10、SM4-12、SM4-15、SX4-10、SX4-12、SX4-15、SM4-20、SX4-20、SM4-30、SM4-40系列伺服阀搭配模块式伺服放大器提供系统闭环控制,具有位置精度高、速度曲线可重复以及可预测的力或力矩的调节等优点。 伺服阀的典型应用包括注塑/吹塑成形系统、测试和仿真装置、压铸机、液压制动器、娱乐设施、石油探测车以及伐木机械等。 威格士伺服阀中

4WRPH6C3B24L-2X/G24Z4/M伺服比例方向阀控制板
4WRPH6C3B12L-2X/G24Z4/M、4WRPH6C3B40P-2X/G24Z4/M、4WRPH6C3B40L-2X/G24Z4/M、4WRPH6C4B24L-2X/G24Z4/M、4WRPH6C4B40L-2X/G24Z4/M、4WRPH6C3B24L-2X/G24Z4/M、4WRPH10C4B100L-2X/G24Z4/M、4WRPH10C3B100L-2X/G24K0/M-