本文主要是介绍CMU/MIT/清华/Umass提出生成式机器人智能体RoboGen,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 导读
- 1. Introduction
- 2. 论文地址
- 3. 项目主页
- 4. 开源地址
- 5. RoboGen Pipeline
- 6. Experimental Results
- 作者介绍
- Reference
导读
CMU/MIT/清华/Umass提出的全球首个生成式机器人智能体RoboGen,可以无限生成数据,让机器人7*24小时永不停歇地训练。AIGC for Robotics。
1. Introduction
全球首个生成式机器人Agent发布了!
长久以来,相比于语言或者视觉模型可以在大规模的互联网数据上训练,训练机器人的策略模型需要带有动态物理交互信息的数据,而这些数据的匮乏一直是具身智能发展的最大瓶颈。
最近,来自CMU、清华、MIT,UMass等机构的研究人员提出了一种全新的RoboGen智能体。
利用涵盖在大语言模型和生成式模型中蕴含的大规模知识,配以逼真模拟世界提供的物理信息,可以「无限」生成各种任务、场景以及教学数据,实现机器人7x24小时全自动训练。
2. 论文地址
https://arxiv.org/abs/2311.01455
3. 项目主页
https://robogen-ai.github.io/
4. 开源地址
https://github.com/Genesis-Embodied-AI
5. RoboGen Pipeline
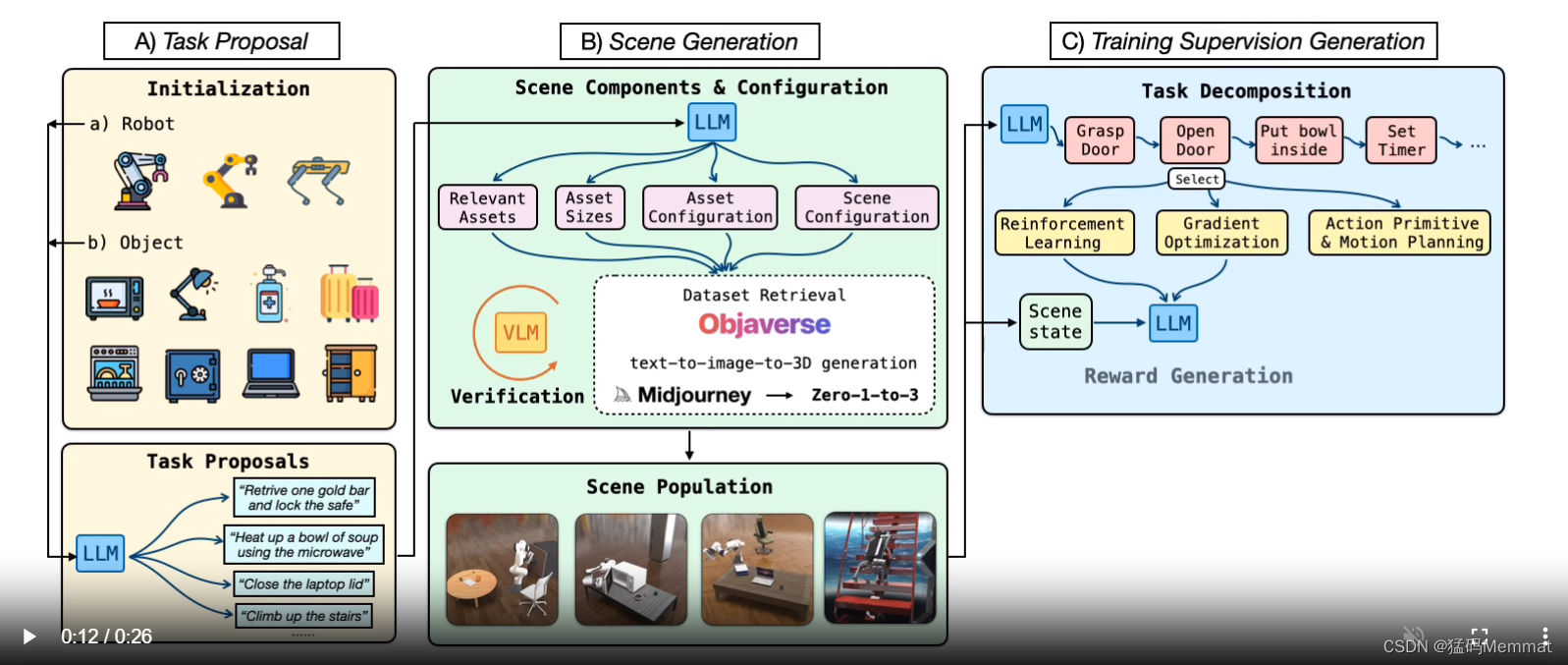
RoboGen is a fully automated pipeline for endless and diverse skill acquisition (获取). RoboGen pipeline consists of 4 stages: A) task proposal, B) scene generation, C) training supervision generation, and D) skill learning with generated information.
RoboGen是一种全自动流程,可以7x24h地让机器人学习各种技能,其中包括4个阶段:
- 任务建议;
- 场景生成;
- 训练监督生成;
- 利用生成的信息进行技能学习。

Amazing!
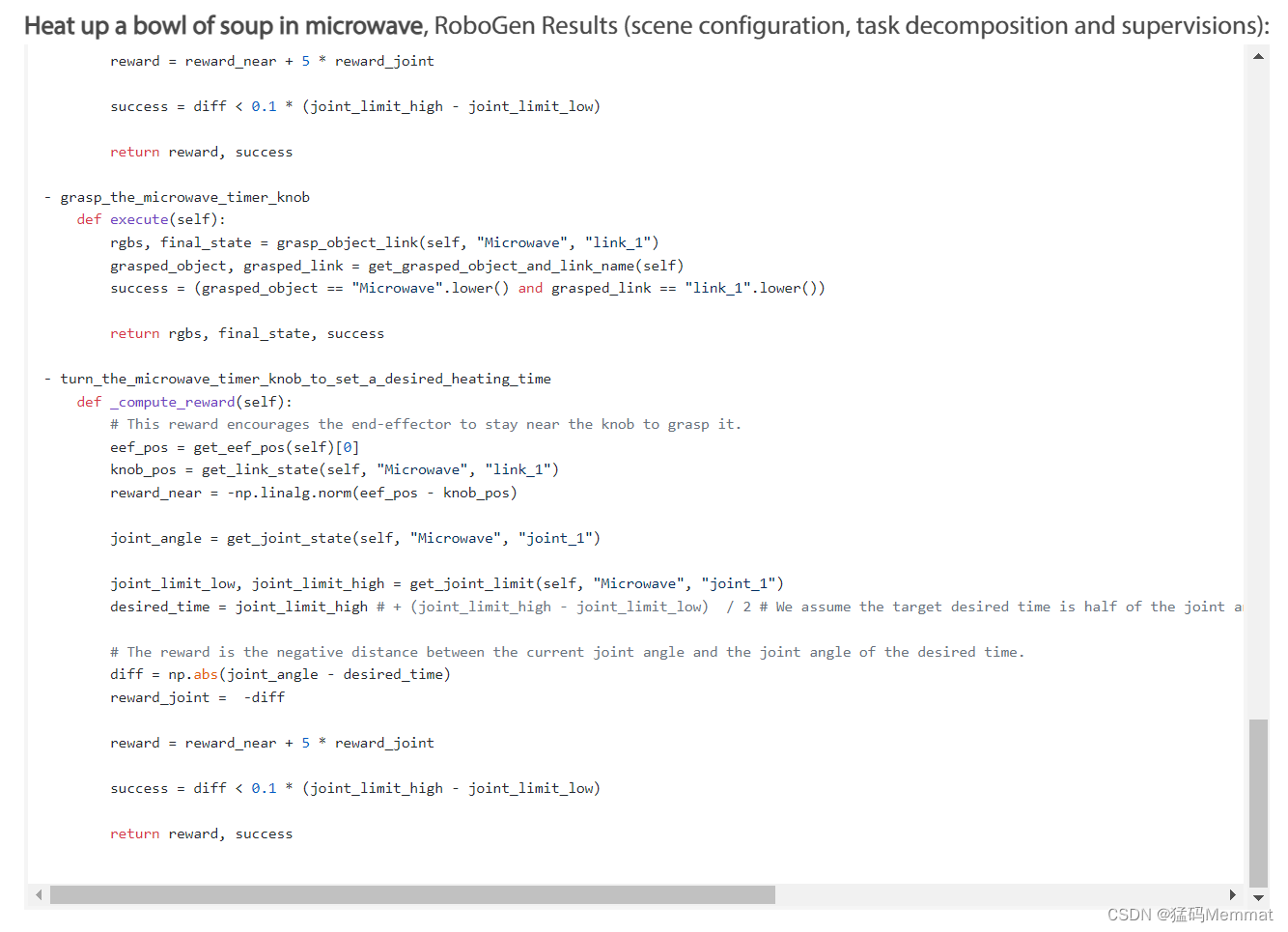
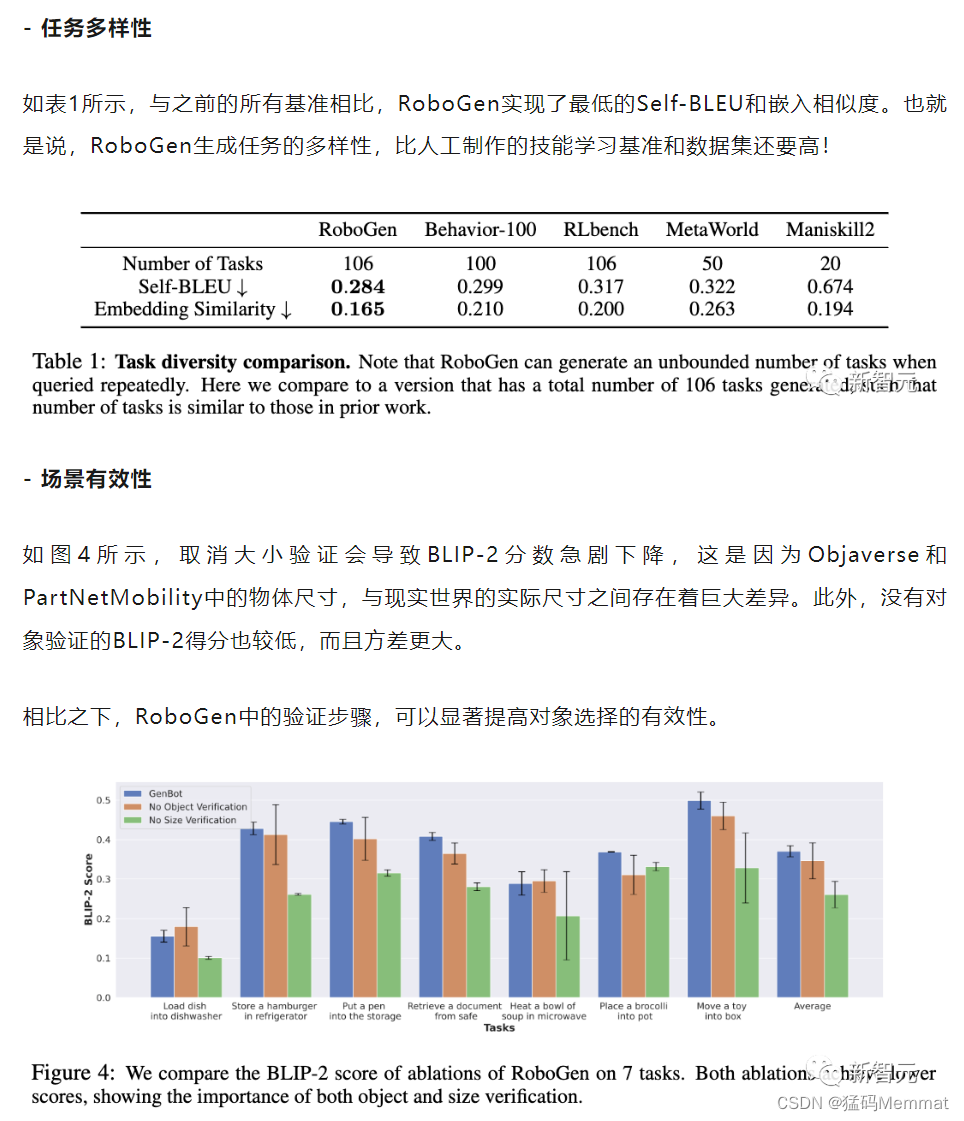
6. Experimental Results

作者介绍



Reference
https://mp.weixin.qq.com/s/2bQTuwE-k6ukp–XHXIzMg
这篇关于CMU/MIT/清华/Umass提出生成式机器人智能体RoboGen的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!