本文主要是介绍ROS下用LS01B镭神智能雷达代替思岚雷达的教程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ROS下用镭神智能的LS01B雷达替换思岚雷达的教程
1.我们先打开镭神智能所提供的用户资料 
把ls01b_v2的文件拉入工控机或者树莓派的catkin_ws/src目录下,我这里使用的是Connetc to Server拉进去的
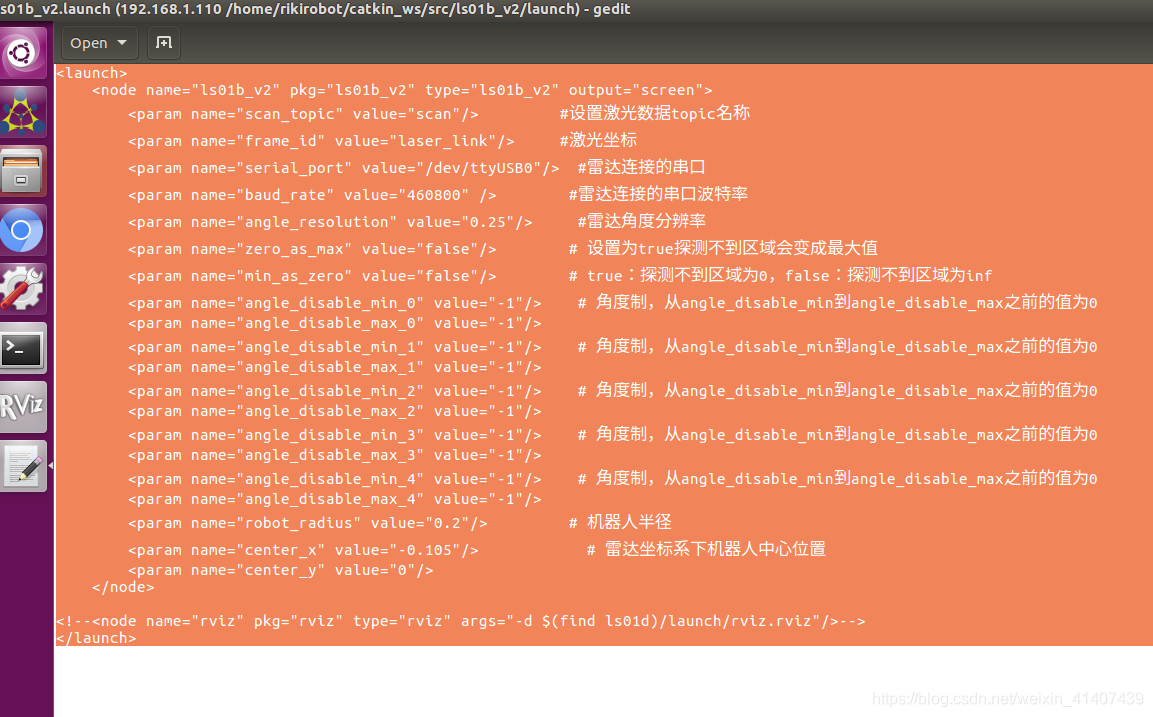
2.打开ls01b_v2/launch/ls01b_v2.launch文件,把里面的内容复制下来
3.把复制下来的内容替换掉原来思岚雷达的launch文件,我这里的目录是catkin_ws/src/rikirobot_project/rikirobot/launch/rplidar.launch,打开rplidar文件,除了
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.04 0 0.18 0 0 0 /base_link /laser 100"/>
这一行其他全部替换掉,替换后如图
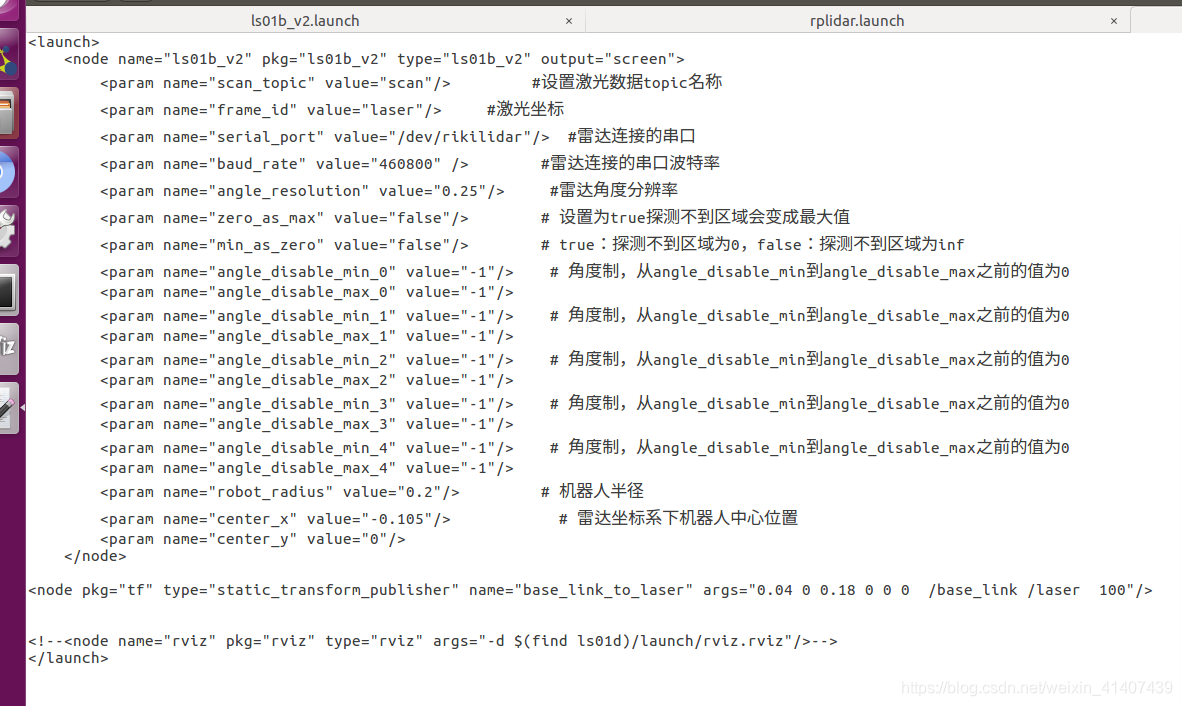
4.修改新的rplidar.launch文件的这一行
<param name="frame_id" value="laser_link"/> #激光坐标
为(我这里以及修改完毕,原来是laser_link)
<param name="frame_id" value="laser"/> #激光坐标
5.退回到工作空间,用catkin_make命令编译一下。
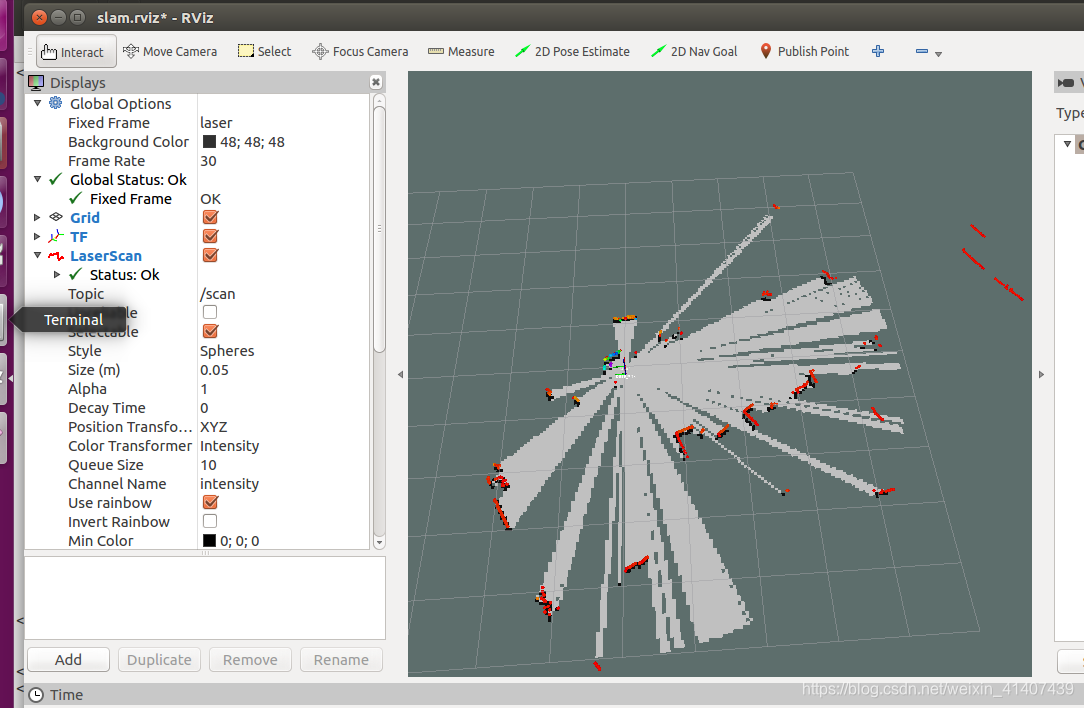
6.打开rviz,把Global Options下的Fixed Frame修改成laser,如图
7.雷达替换完毕,谢谢阅读
这篇关于ROS下用LS01B镭神智能雷达代替思岚雷达的教程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









