本文主要是介绍Robotics: Aerial Robotics(空中机器人)笔记(一): 初识四旋翼无人机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
我们如何创造出能够在杂乱的室内外环境中自主运行的敏捷微型飞行器?通过本课程的学习,你将获得飞行力学和四旋翼飞行机器人设计的介绍,并将能够开发动态模型、推导控制器和在三维环境中运行的规划器。您将面临在复杂的三维环境中使用噪声传感器进行定位和机动的挑战。最后,您将通过看到快速增长的无人机行业可能的应用和挑战的现实例子,获得见解。
数学先决条件:选修本课程的学生应熟悉线性代数、单变量微积分和微分方程。
编程先决条件:推荐一些使用MATLAB或Octave编程的经验(本课程中我们将使用MATLAB)MATLAB将需要使用64位计算机。
本专栏是近期 Coursera上宾夕法尼亚大学Kumar教授的课程——Robotics: Aerial Robotics 整理的一些笔记,上面是Coursera课程上对该课程的介绍(机翻请见谅),欢迎对无人机感兴趣的小伙伴们一起学习。
原课程链接
四旋翼无人机
无人机有很多种,本次课程主要讲的是四旋翼的无人机(quadrotors),它包括四个可独立控制的转子,挂载在一个刚体机架上,也就是下图的这种:

从顶部观察时,旋翼1和旋翼3朝逆时针方向转动,而旋翼2和旋翼4是朝顺时针方向转动的。
如果你改变这些旋翼的旋转速度(也就是电机的速度), 你就可以控制飞行器的位置与朝向。
俯仰(pitch)和翻滚(roll)
如果你控制其中一个电机并加快其转速, 你就会使得无人机倾斜偏向一个方向。
如果我们加快另一个电机的转速,你就会使其俯仰或翻滚偏向另一个方向。




平移(translation)
平移其实是一个比较复杂的运动,涉及翻滚或俯仰。我们首先需要做的是使无人机向前方倾斜:

但是当接近目标时,无人机停应当下来。 为此,需要向反方向倾斜,产生一个相反推力使其在接近目标时减速。然后使它反向倾斜以恢复到平衡状态。

自主飞行的关键组件
自主飞行有四个关键组件:
状态估计(state estimation):指无人机估计其位置、方向和速度的能力。换句话说,就是位置和方向的变化率。
控制(control):根据需要行驶的位置和对当前状态的估计,无人机必须能够计算需要发送给电机或转子的指令,并使其以适当的速度旋转以实现所需的动作。
制图(mapping):它不知道周围的环境是什么样子,那么它就无法对这个环境进行推理,也无法在这个环境中规划安全的轨迹。
规划(planning):给定一组障碍物和一个目的地,无人机必须能够计算出一条轨迹,一条从一个点到另一个点的安全路径。
状态估计(state estimation)
状态估计的目的是能够获得当飞行器在三维空间中运动时,位置与速度的可靠估计 。
在实验室环境下一般用动捕相机获取高精度的无人机的位置信息,而在室外条件下则可以用GPS来获取位置信息。
当在没有GPS, 也没有外部运动捕捉相机,或是其他外部传感器的条件下时,通常采用SLAM(Simultaneous Localization and Mapping)来完成导航任务:
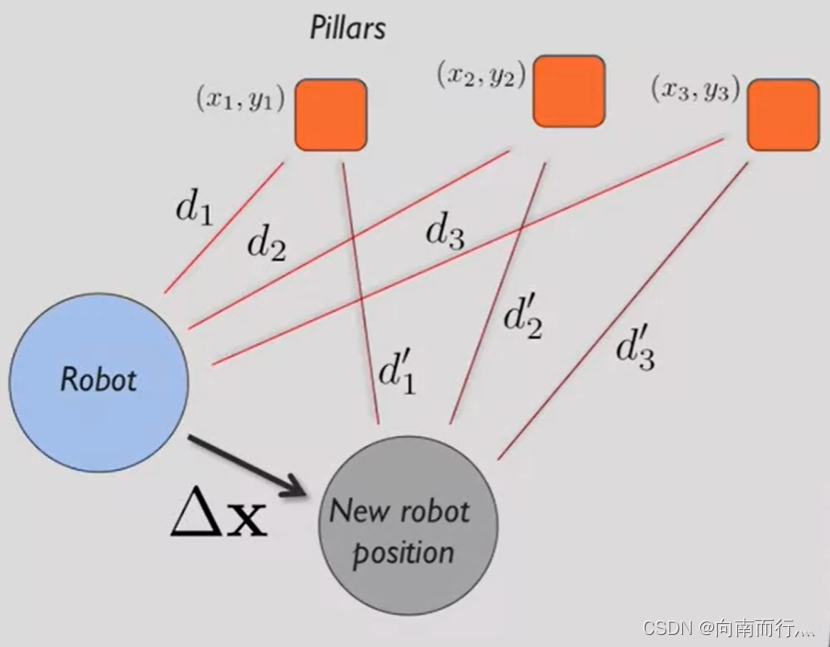
假定在二维空间中机器人拥有惯性测量单元能够估计其由一个位置到另一个位置的运动。
当其到达新的位置时,测距仪估计其先前所测量的柱子的位置。 假定现在的距离估计d1‘,d2‘与d3‘ 不同于原来的深度估计d1,d2与d3。 所以我们需要解决的问题是,对于机器人是否可能
同时估计柱子的位置与位移这几个变量,这就是SLAM。
下一章链接:
Robotics: Aerial Robotics(空中机器人)笔记(二):无人机能量学与系统设计
这篇关于Robotics: Aerial Robotics(空中机器人)笔记(一): 初识四旋翼无人机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







