aerial专题

读论文 | Small object detection model for UAV aerial image based on YOLOv7
目录 1、前言 2、摘要 3、论文的方法 3.1 方法描述 3.2 方法改进 3.3 本论文的模型图 3.4 本文的数据集: 3.5 论文实验 3.6 解决的问题 3.7 论文总结 (1)文章优点 (2)方法创新点 (3)未来展望 1、前言 该论文代码未公开,大家看看方法啥的就好,里面详细的细节不用深究。没有公开代码的论文,一般是不看的。 原文:《Sma

Aerial Cactus Identification(空中仙人掌鉴定)
Aerial Cactus Identification 空中仙人掌鉴定 二分类问题 方案一: import pandas as pd # data processing, CSV file I/O (e.g. pd.read_csv)import os,cv2from IPython.display import Imagefrom keras.preprocessing impor
YOLC: You Only Look Clusters for Tiny Object Detection in Aerial Images
摘要 由于以下因素,从航拍图像中检测物体面临着重大挑战:1)航拍图像通常具有非常大的尺寸,通常有数百万甚至数亿像素,而计算资源有限。2)物体尺寸较小导致有效信息不足,无法进行有效检测。3)物体分布不均匀导致计算资源浪费。为了解决这些问题,我们提出YOLC(You Only Look Clusters),一种基于无锚点目标检测器CenterNet的高效且有效的框架。为了克服大规模图像和非均匀物体分
ReDet:A Rotation-equivariant Detector for Aerial Object Detection
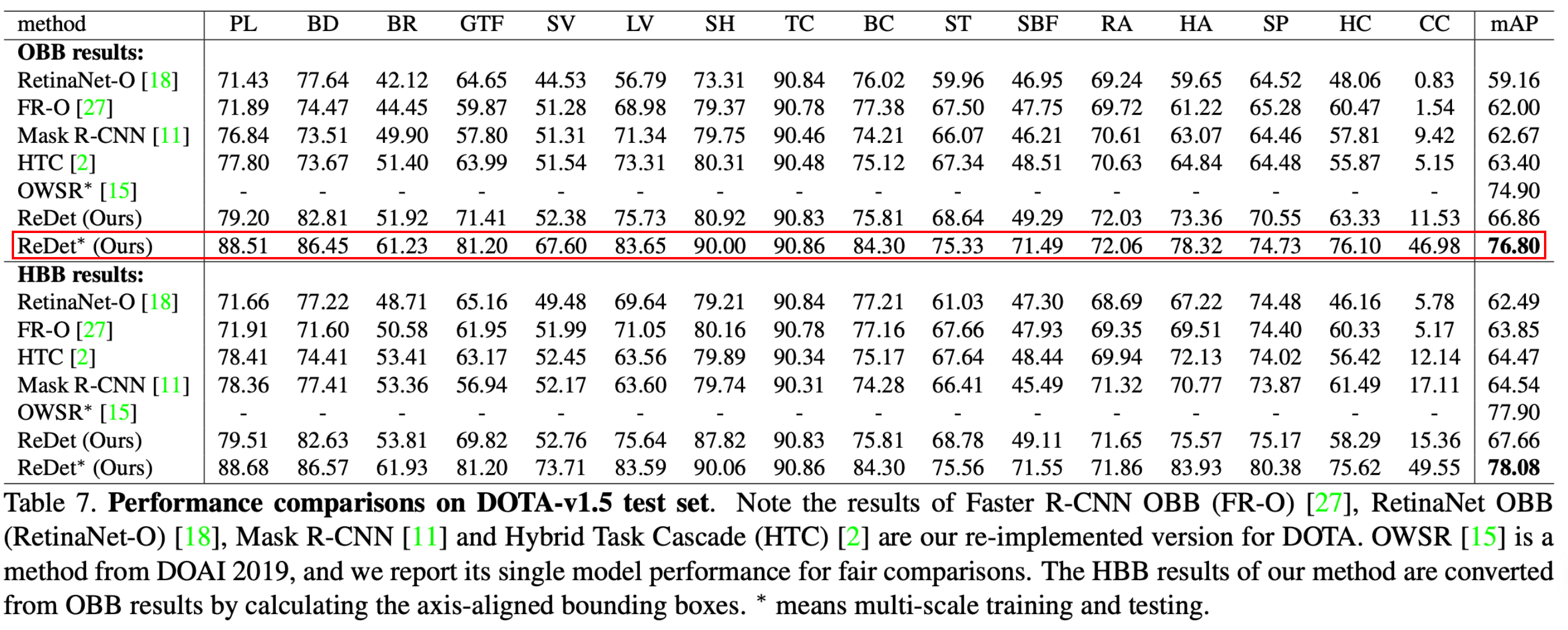
ReDet:A Rotation-equivariant Detector for Aerial Object Detection 文章目录 ReDet:A Rotation-equivariant Detector for Aerial Object Detection参考IntroductionRelated WorksPreliminariesRotation-equivaria

Tiny Object Detection in Aerial Images论文简读
code: https://github.com/jwwangchn/AI-TOD 文章目录 摘要论文的贡献 摘要 近年来,地球视觉中的目标探测取得了很大的进展。然而,航空图像中的微小物体检测仍然是一个非常具有挑战性的问题,因为微小物体包含的像素很小,很容易与背景混淆。为了推进航空图像中的微小物体检测研究,我们提出了一种新的航空图像中的微小物体检测数据集(AI-TOD)。具体
Robotics: Aerial Robotics(空中机器人)笔记(一): 初识四旋翼无人机
我们如何创造出能够在杂乱的室内外环境中自主运行的敏捷微型飞行器?通过本课程的学习,你将获得飞行力学和四旋翼飞行机器人设计的介绍,并将能够开发动态模型、推导控制器和在三维环境中运行的规划器。您将面临在复杂的三维环境中使用噪声传感器进行定位和机动的挑战。最后,您将通过看到快速增长的无人机行业可能的应用和挑战的现实例子,获得见解。 数学先决条件:选修本课程的学生应熟悉线性代数、单变量微积分和微分方程。
Aerial Vision-and-Dialog Navigation阅读报告
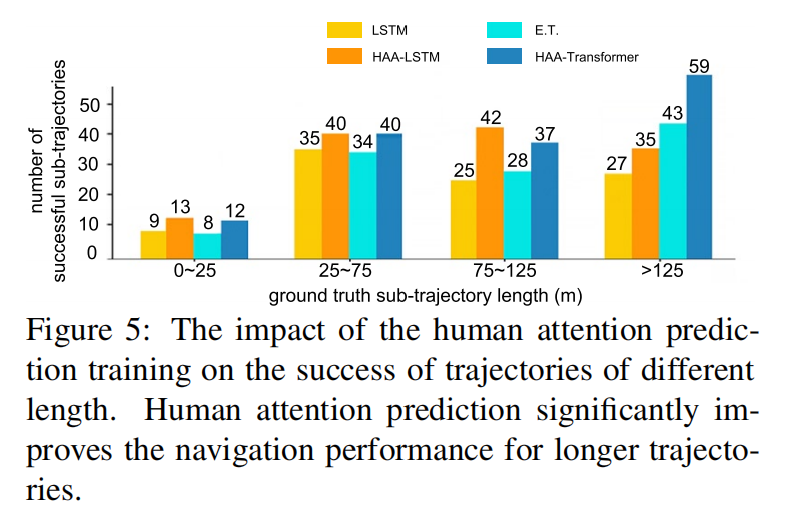
Aerial Vision-and-Dialog Navigation 本次报告,包含以下部分:1摘要,2数据集/模拟器,3AVDN任务,4模型,5实验结果。重点介绍第2/3部分相关主页:Aerial Vision-and-Dialog Navigation (google.com) 包含,code,paper,dataset 一,摘要 这一部分将论文中的摘要,引言,相关工作,合并介
FCOSR: A Simple Anchor-free Rotated Detector for Aerial Object Detection阅读笔记
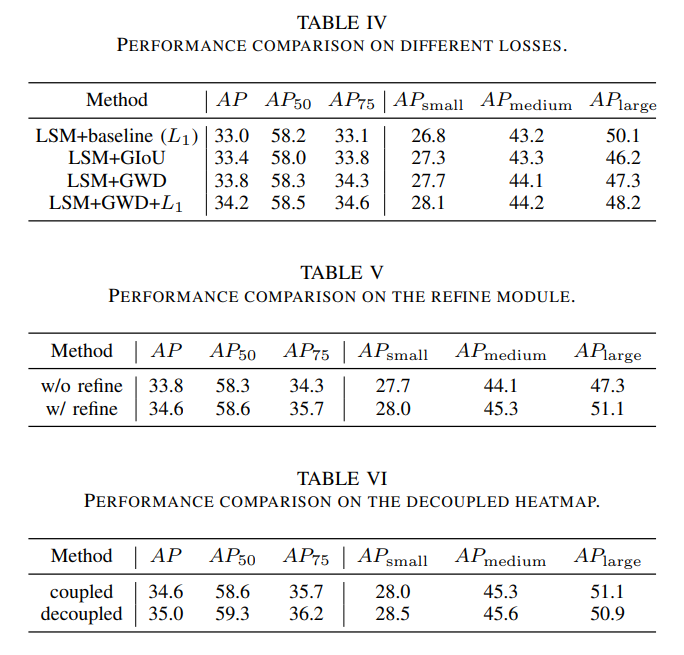
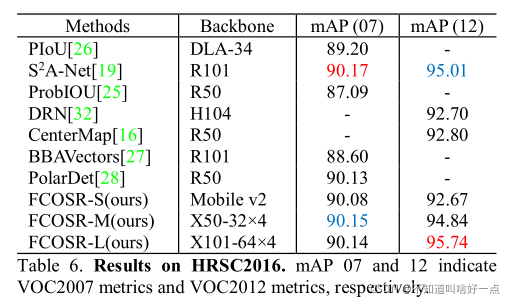
FCOSR论文阅读笔记 (一) Title(二) Summary(三) Method3.1 网络输出3.2 椭圆中心采样3.3 Fuzzy sample label assignment3.4 多阶段采样3.5 损失函数 (四) Experiments4.1 实验设置4.2 消融实验4.3 精度和速度4.5 公开数据集上的对比实验 (五) Conclusions(六) Notes8.1 主流

cousera Aerial Robotics 无人飞行器 笔记1
第一周 综述 写在前面 这个暑假花了大概整整一周时间拿到了课程的证书,本课程主要内容是四旋翼的系统设计和控制,本课程对于运动学和动力学的数学推导有着比较详细的介绍,并在编程作业中对四旋翼的控制和路径规划进行了仿真,前置课程主要是自动控制原理和理论力学,编程作业主要是用Matlab,目前还没有中文字幕。 由于作者水平有限,可能存在错误,还望指正。 各种各样的无人飞行器 aerial rob