本文主要是介绍Open3D ICP精配准(点到面),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、简介
- 二、实现代码
- 三、实现效果
- 参考文献
一、简介
ICP算法总共分为6个阶段,如下图所示:
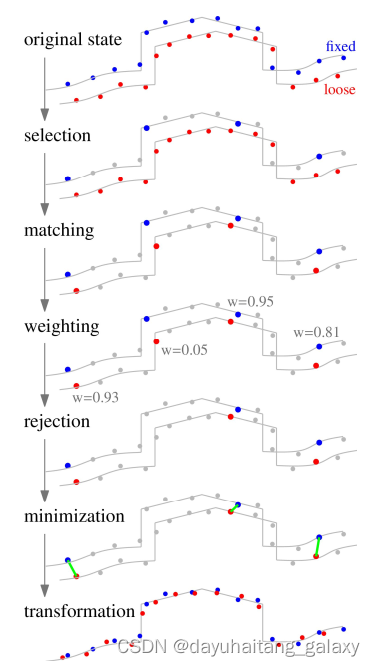
(1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。
(2)匹配特征点。通常是距离最近的两个点,当然这需要视评判的准则而定。
(3) 加权。根据点的匹配程度对找到的对应点进行加权。
(4)抑制匹配点。根据匹配点的匹配程度来对一些质量较差的点对进行抑制(剔除)。
(5)误差最小化。通过最小化距离的平方和来估计变换参数。
(6)点云变换。通过评估出的变换矩阵来转换源点云。
整个过程除了最后一步,剩余的步骤已有大量的文献进行过探索和研究,因此也出现了诸多变种方法,其中点到面的ICP就是其中一种,即使用一个点到另一个点切平面的垂直距离(“点到平面”误差度量,如下图所示)来衡量配准结果的质量,这种误差度量的特点是收敛速度快,
这篇关于Open3D ICP精配准(点到面)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








