点到面专题

从点到面:解密PointNet++如何让点云处理更智能
哈喽,大家好,我是Sunny。 在点云处理领域,PointNet++是一篇非常有影响力的论文,它提出了一种新的方法来处理3D点云数据。相比于它的前作PointNet,PointNet++在捕捉局部结构和上下文信息方面做出了重要改进。本文将详细介绍PointNet++的主要思想,重点解释其网络结构。 背景:点云数据与挑战 点云是3D空间中数据的集合,其中每个点都包含空间坐标和可能的附加特征(如

unity计算三维空间下点到线,点到面,线到线,线到面,面到面最短距离的点的方法
通用的一个方法GetDistance,计算两个点的距离,不开平方 /// <summary>/// 获取两个点的距离,不开平方/// </summary>/// <param name="a"></param>/// <param name="b"></param>/// <returns></returns>public static float GetDistance(Vecto
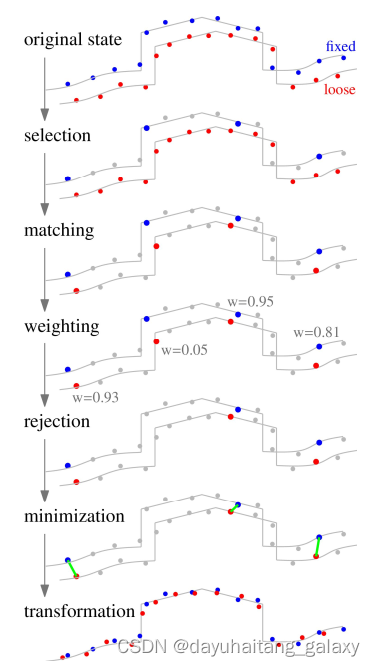
Open3D ICP精配准(点到面)
文章目录 一、简介二、实现代码三、实现效果参考文献 一、简介 ICP算法总共分为6个阶段,如下图所示: (1)挑选发生重叠的点云子集,这一步如果原始点云数据量比较巨大,一般会对原始点云进行下采样操作。 (2)匹配特征点。通常是距离最近的两个点,当然这需要视评判的准则而定。 (3) 加权。根据点的匹配程度对找到的对应点进行加权。 (4)抑制匹配点。根据匹配点的匹
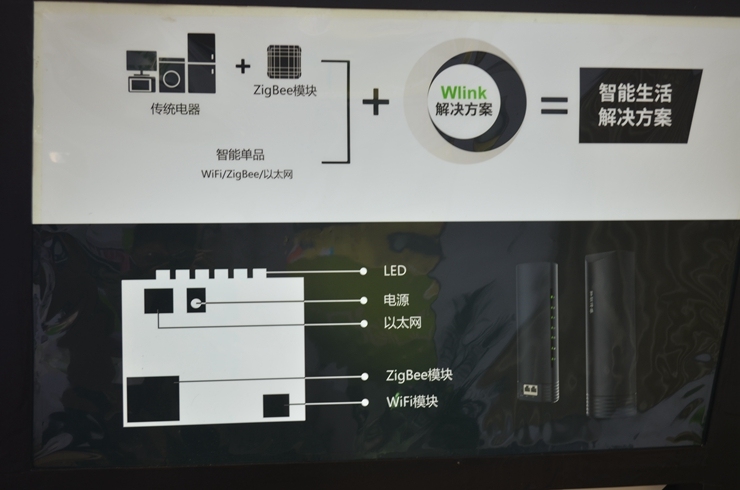
AWE 2016 – 从点到面,Wulian布局智能家居生态
Wulian的物联网脚步从产品、方案、系统化延伸到平台和整个智能家居生态,形成智能家居矩阵,全方位演绎未来生活。 2016年3月9日,AWE 2016在上海新国际博览中心正式拉开帷幕,数百家来自各地的企业同台竞技。作为领先的物联网设备和解决方案提供商,Wulian亮相今年专门开辟的智能家居展馆,并带来了一系列新的产品和技术。 新方式:带来独特观展体验 全息技术立体展示