本文主要是介绍伸缩升降料箱机器人HEGERLS A42T|灵活覆盖超广立体存储空间|大幅提升仓储利用率,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
随着仓租上升,存储密度对物流仓库的重要性将不断提升。正是这种着眼于客户的理念和意识,促使海格里斯HEGERLS团队开始了伸缩升降料箱机器人的研发。伸缩升降料箱机器人HEGERLS A42T的发布,是海格里斯HEGERLS持续聚集客户仓储痛点的产物,标志着海格里斯HEGERLS箱式仓储机器人产品的又一创新,助力更多企业实现仓储自动化改造,提升仓储密度,打造超高柔性仓储。
伸缩升降料箱机器人HEGERLS A42T
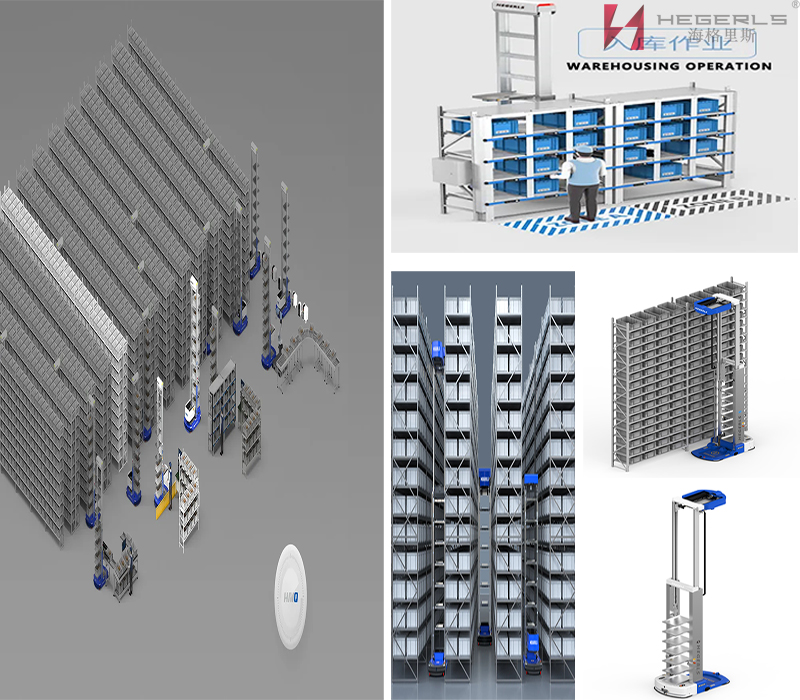
库宝HEGERLS A42T伸缩升降料箱机器人,由海格里斯自主研发,为提升10米层高仓库存储密度而设计。其取货高度覆盖0.35m~8m,实现在不规则、不等高仓库进行料箱拣选、存取、搬运等,灵活覆盖超广立体存储空间,大幅提升仓储利用率。作为一款全新的智能化物流搬运设备,HEGERLS A42T无需借助任何轨道设备,即可实现仓储空间内智能行走,具有自主导航、主动避障和自动充电等功能。智能算法优化高低冷热库位、跨区存取拣选效率,保证机器人在不规则、不等高仓库中作业效率。与传统AGV“货架到人”的解决方案相比,库宝机器人拣选颗粒度更小,根据系统下发的订单需求,真正实现从传统的“人找货”转变为高效简单的“货到人”智能拣选模式。与堆垛机、自动立体仓库的解决方案相比,库宝机器人系统可实现高效部署,且整体部署成本低,柔性更强;同时HEGERLS A42T支持对接多种物流设备,包括货架、潜伏式AGV、机械臂、多功能工作站等。柔性灵活的产品设计为定制化方案带来更多操作空间,全面提升仓储运作效率,优化仓储密度,实现仓储行业自动化、智能化改造。适用场景:适用3PL、鞋服、电商、电子、电力、制造、医用、零售等各行业的仓储应用,特别适用不规则、不等高仓库场景,以及机器人需灵活穿越消防区域和搭载电梯场景。
伸缩升降料箱机器人HEGERLS A42T功能特性
最高取货高度8米,超广立体存储空间;
多货箱搬运,单机存取搬运多达8个货箱;
动态调宽货叉设计,兼容多尺寸纸箱/料箱。
超柔性·伸缩升降料箱机器人HEGERLS A42T
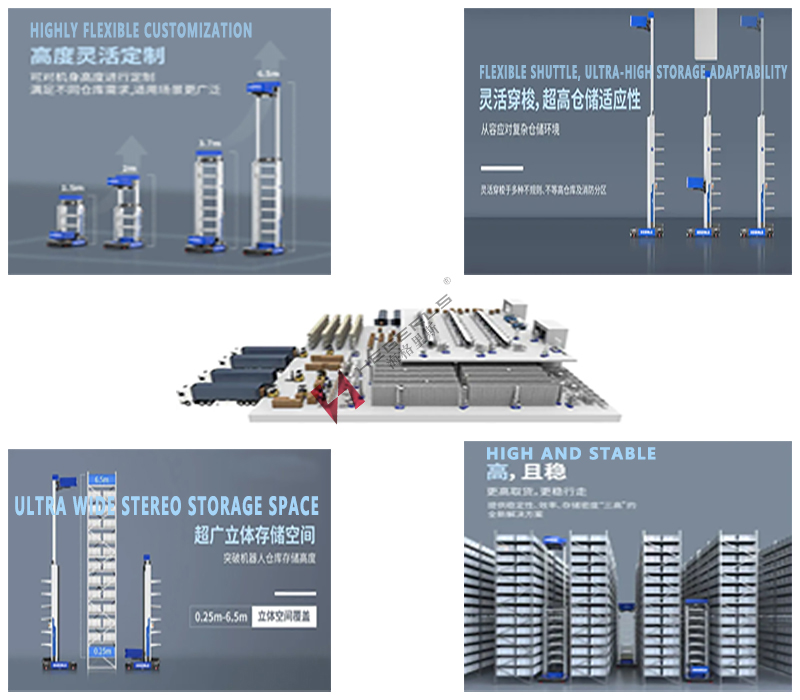
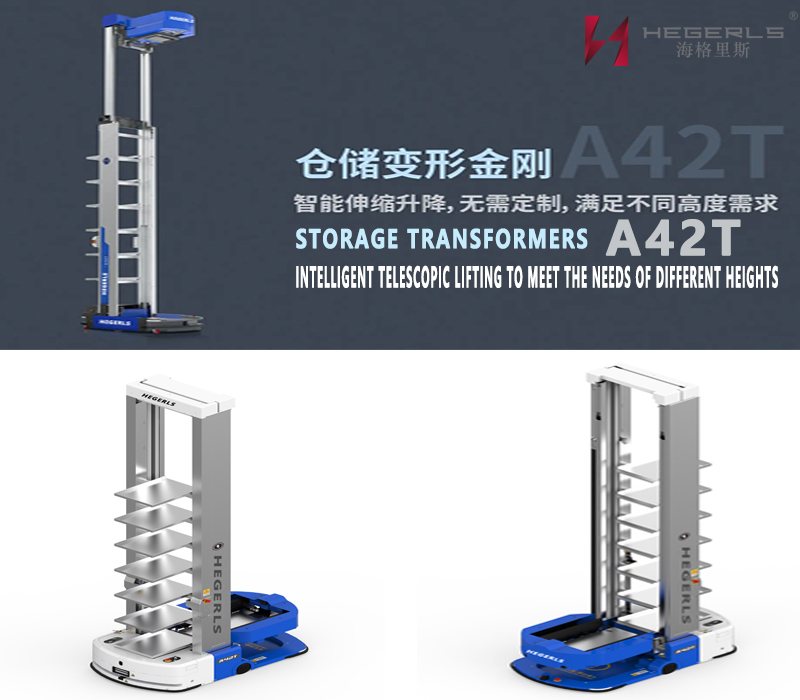
1无需模块化定制,智能伸缩升降
相对于模块化定制的机器人,伸缩升降料箱机器人HEGERLS A42T具备智能伸缩升降功能,3.7m机身可升高至6.5m,最大化利用仓库空间,实现超高柔性仓储。
20.25m到6.5m,超广立体存储空间覆盖
伸缩升降料箱机器人HEGERLS A42T再次突破机器人仓库存储高度,机器人最低存取范围低至0.25m,最高可达6.5m,实现超广立体空间覆盖,提升存储密度。
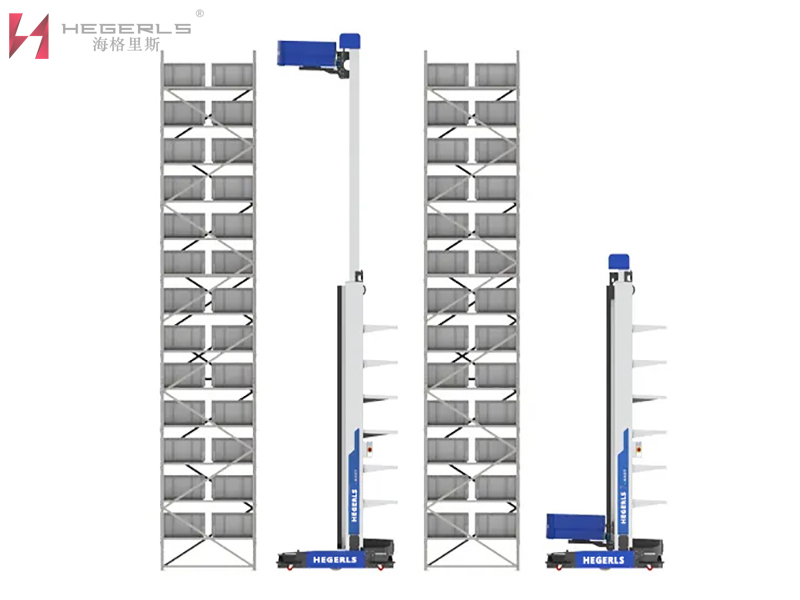
3有高度,且稳定
品质提升,更要安全可靠。伸缩升降料箱机器人HEGERLS A42T能实现对6.5m货架上料箱的存取、搬运及分拣。取货高度提升的同时,机身高度仅3.7m,机器人行走更稳定、快速,提供了稳定性、效率、存储密度“三高”的全新解决方案。
4灵活定制可能,满足多种需求
伸缩升降料箱机器人HEGERLS A42T提供灵活化定制服务,可对机身高度进行定制,满足每个仓库的不同需求,适用场景更广泛。

超可能·解锁各类仓储需求
01智能适配不规则仓库,超高仓储适应性
伸缩升降料箱机器人HEGERLS A42T进一步提升仓储适应性,灵活穿梭于多种不规则、不等高仓库,从容应对消防管道、建筑横梁等造成的复杂仓储环境,降低仓储自动化改造门槛,发挥仓储密度极限,赋能更多仓储。
02消防/防火分区,效率不分区
仓库中消防/防火分区易导致两区效率不均问题,伸缩升降料箱机器人HEGERLS A42T特有的伸缩升降功能助力机器人轻松穿梭于防火分区两侧,柔性应对不同存储区效率要求,实现机器人在各分区之间的相互调动,达到最高利用率。
03搭载电梯,上下自由穿梭
伸缩升降料箱机器人HEGERLS A42T具备搭载电梯的功能,实现上下楼层自由穿梭,覆盖更广仓储运行范围,可实现对不同楼层库区及产线的对接,结合定制化解决方案,满足客户需求。
04方便运输,快速部署
伸缩升降料箱机器人HEGERLS A42T“小巧”的体型更容易运输与搬运,提升部署速度,为整体项目实施提效,更快一步为客户降本增效。
海格里斯HEGERLS
海格里斯HEGERLS一直致力于通过机器人技术和人工智能算法,提供高效、智能、柔性、定制化的仓储自动化解决方案,为每个工厂和物流仓库创造价值。海格里斯专注于箱式仓储机器人系统研发设计,实现机器人本体、底层定位算法、控制系统、机器人调度、智能仓储管理系统等核心元素的自主研发覆盖并已进行专利布局。旗下库宝系统是最早研发及投入商业使用的箱式仓储机器人系统,已应用于3PL、鞋服、电商、电子、电力、制造、医用等各行业。使用库宝系统,客户可于一周内实现仓库自动化改造,提升80%-130%存储密度,并提高工人工作效率3-4倍。
这篇关于伸缩升降料箱机器人HEGERLS A42T|灵活覆盖超广立体存储空间|大幅提升仓储利用率的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







