本文主要是介绍FPGA驱动步进电机-Sin曲线加速,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FPGA驱动步进电机-Sin曲线加速
- 基本实现原理
- 实际仿真的波形
- 程序
以下由特权同学的FPGA文档摘取
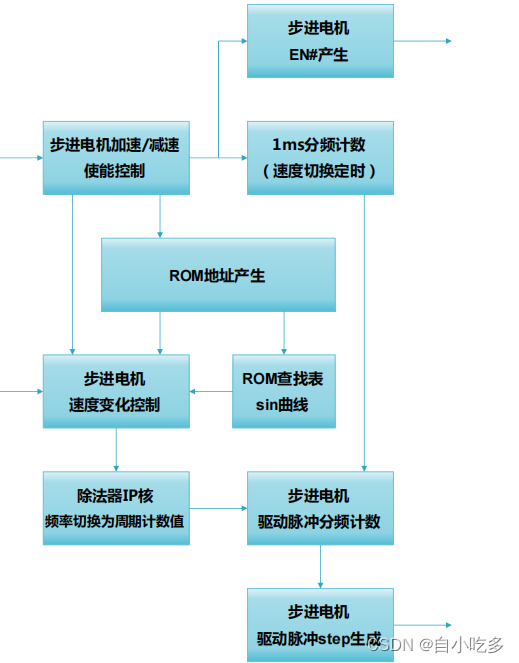
Sin 曲线控制 step 脉冲信号生成的功能框图如下所示。
基本实现原理
①判断步进电机驱动的目标频率 stepper_delay_target 与当前频率 stepper_delay_current的值是否一致,若一致,则不做任何加速、减速操作,保持当前速度运行;若目标频率高于当前频率,则执行加速;若目标频率低于当前频率,则执行减速。
②在加速或减速控制开启状态下,1ms 分频计数逻辑每个 1ms 产生一个高脉冲,用于切换当前的速度。
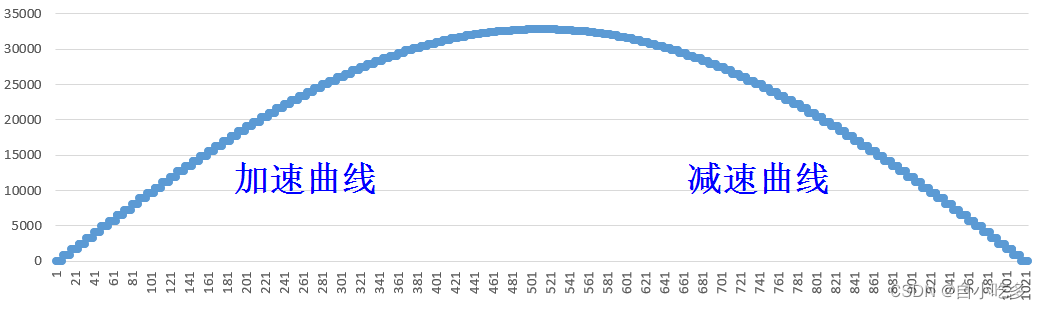
③在每 1ms,步进电机的速度都会加速或减速一定的频率值,这个频率值和匀加速总是“固定”不同,它是变化的。在低频时,速度变化量较大,而高速时,速度变化量较小。这个速度到底如何变化?变化多少?我们现实用 matlab 产生了一个 0‐pi 的 sin 曲线,并且将曲线所对应的 1024 个 16bit 数据存储到了 FPGA 的片内 ROM 里(实际使用中,0~0.5pi 部分的上升曲线作为步进电机加速的频率曲线,而 0.5pi~pi 的下降曲线作为步进电机减速的频率曲线)。如图所示,X 取值为 0~511 的曲线(左侧曲线,取 0~0.5pi 的 512 个正弦值放大 32768倍,并且挪到 0 点以上)作为加速曲线,X 取值为 512~1023 的曲线(右侧曲线,取 0.5pi~pi的 512 个正弦值放大 32768 倍)作为减速曲线。
那么这两段曲线如何使用?
由于加速或减速所用到的 sin 查表值都是 512 个,所以我们加速或减速所需经过的中间频率都是 512 个。对于加速操作,目标频率 stepper_delay_target,加速起始频率stepper_delay_current 的差值,需要经过 x 个中间加速频率点(x 从 0 递增到 511),我们可以算得当前加速的 delta_speed_pulse = (stepper_delay_target ‐stepper_delay_current ) * (x 为地址对应的 ROM 数据)/32768,即最终用(stepper_delay_target ‐ delta_speed_pulse/32768)作为当前频率点。换句话说,就是用 sin 曲线作为整个加速过程的频率差值,用目标频率减去这个差值,就可以得到从其实频率逐渐靠近目标频率的加速过程,并且这个加速过程和图示左侧的曲线一样越来越平滑。对于减速操作也类似,只不过它是用停止频率或减速目标频率加上当前 sin 曲线算出的频率差值作为当前中间频率点。
④实际的 FPGA coding 中,必须把“频率”换算为“周期”,便于计数。这个换算很简单,用 1s 时间除以“频率”值即可。而由于“周期”必须换算为“时钟脉冲个数”为单位,所以我们把这个除法运算中的“除数”也换算为“时钟脉冲个数”为单位,因此 1s/20ns(时钟周期为 20ns)即除数 50_000_000。
⑤算出了加速或减速过程中不断变化的步进电机驱动的脉冲周期stepper_delay_current_period,就能够产生步进电机驱动的脉冲了。
实际仿真的波形
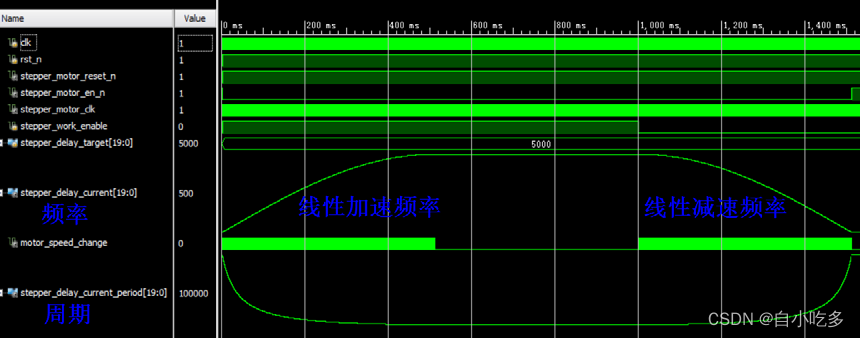
以上匀加速/减速操作下,设定步进电机的启动频率为 500Hz,可以稳定加速到 5KHz,加速时间需要 512*1ms = 512ms
程序
module stepper_motor_controller(input clk, //50MHzinput rst_n, //复位信号,低电平有效output stepper_motor_reset_n, //步进电机复位信号,低电平有效output reg stepper_motor_en_n, //步进电机驱动信号输出有效信号,低电平有效output reg stepper_motor_clk, //步进电机的前进脉冲,上升沿有效发起一个步进电机转动input stepper_work_en, //步进电机使能input[19:0] stepper_delay_target, //步进电机两次stpe之间的延时,取值必须大于2,目标延时值output reg[19:0] stepper_delay_current //步进电机两次stpe之间的延时,取值必须大于2,当前延时值);parameter START_FRE = 20'd1000; //步进电机起步频率,单位Hz
parameter TIMER_1MS = 20'd50_000; //1ms定时计数最大值,时钟为50MHz(20ns)
parameter CLK_NUMER_PERIORD = 32'd50_000_000; //除数,单位20ns//---------------------------------------------------------------------------
reg speed_up_en; //加速功能开启
reg[1:0] speed_up_en_r; //加速寄存器打一拍
reg speed_down_en; //减速功能开启
reg[1:0] speed_down_en_r;//减速寄存器打一拍
reg[19:0] stepper_cnt; wire pos_speed_up_en; //speed_up_en上升沿,表示开始启动加速
wire pos_speed_down_en; //speed_down_en上升沿,表示开始启动减速 //---------------------------------------------------------------------------
//复位
assign stepper_motor_reset_n = rst_n; //---------------------------------------------------------------------------
//1s加速/减速定时
reg[19:0] xcnt;always @(posedge clk or negedge rst_n)if(!rst_n) xcnt <= 20'd0;else if(!speed_up_en && !speed_down_en) xcnt <= 20'd0;else if(xcnt < (TIMER_1MS-1)) xcnt <= xcnt+1'b1;else xcnt <= 20'd0; wire motor_speed_change = (xcnt == (TIMER_1MS-1)); //ms定时信号,高电平有效,切换速度//---------------------------------------------------------------------------
//例化ROM,存储sin输出1024个0-pi的结果,放大1024倍
reg[9:0] rom_addr;
wire[15:0] rom_data;blk_mem_gen_0 uut_blk_mem_gen_0 ( //IP核.address ( rom_addr ),.clock ( clk ),.q ( rom_data )); //---------------------------------------------------------------------------
//匀加速、减速控制 //加速控制使能
always @(posedge clk or negedge rst_n)if(!rst_n) speed_up_en <= 1'b0; else if(motor_speed_change && (rom_addr == 10'd511)) speed_up_en <= 1'b0; else if(((stepper_delay_current < stepper_delay_target) && stepper_work_en)) speed_up_en <= 1'b1;else speed_up_en <= 1'b0;always @(posedge clk)speed_up_en_r <= {speed_up_en_r[0],speed_up_en}; //记录电平变化assign pos_speed_up_en = ~speed_up_en_r[1] & speed_up_en_r[0]; //speed_up_en上升沿,表示开始启动加速//减速控制使能
always @(posedge clk or negedge rst_n)if(!rst_n) speed_down_en <= 1'b0; else if(motor_speed_change && (rom_addr == 10'd1023)) speed_down_en <= 1'b0; else if(stepper_work_en) beginif(stepper_delay_current > stepper_delay_target) speed_down_en <= 1'b1; else speed_down_en <= 1'b0;endelse beginif(stepper_delay_current > START_FRE) speed_down_en <= 1'b1;else speed_down_en <= 1'b0; endalways @(posedge clk) speed_down_en_r <= {speed_down_en_r[0],speed_down_en};assign pos_speed_down_en = ~speed_down_en_r[1] & speed_down_en_r[0]; //speed_down_en上升沿,表示开始启动减速
wire neg_speed_down_en = speed_down_en_r[1] & ~speed_down_en_r[0];//---------------------------------------------------------------------------
//ROM地址产生,对应加速/减速参数选择控制always @(posedge clk or negedge rst_n)if(!rst_n) rom_addr <= 10'd0;else if(pos_speed_up_en) rom_addr <= 10'd0;else if(pos_speed_down_en) rom_addr <= 10'd512;else if(motor_speed_change && (speed_up_en || speed_down_en)) rom_addr <= rom_addr+1'b1;else ; //---------------------------------------------------------------------------
//乘法运算
wire[35:0] mult_result;
reg[19:0] mult_datab;
reg[19:0] speed_up_start;//锁存加速起始频率
always @(posedge clk or negedge rst_n)if(!rst_n) speed_up_start <= 20'd0;else if(pos_speed_up_en) speed_up_start <= stepper_delay_current;//计算当前运行频率和目标频率差
always @(posedge clk or negedge rst_n)if(!rst_n) mult_datab <= 20'd0;else if(pos_speed_up_en) mult_datab <= stepper_delay_target - stepper_delay_current; //加速else if(pos_speed_down_en) beginif(!stepper_work_en) mult_datab <= stepper_delay_current - START_FRE; //停止的减速else mult_datab <= stepper_delay_current - stepper_delay_target; //运行中减速end//频率差*(加速频率/32768)
mult_gen_0 uut_mult_gen_0 (.clock ( clk ),.dataa ( rom_data ),.datab ( mult_datab ),.result ( mult_result ));wire[19:0] delta_speed_down_pulse = mult_result[34:15]; //加速或减速频率差值
wire[19:0] delta_speed_up_pulse = mult_result[34:15]; //加速或减速频率差值//---------------------------------------------------------------------------
//步进电机使能控制always @(posedge clk or negedge rst_n)if(!rst_n) stepper_motor_en_n <= 1'b1;else if(stepper_work_en) stepper_motor_en_n <= 1'b0;else if(!stepper_work_en && (stepper_delay_current == START_FRE)) stepper_motor_en_n <= 1'b1;//---------------------------------------------------------------------------
//步进电机的step产生//步进电机当前频率产生
always @(posedge clk or negedge rst_n)if(!rst_n) stepper_delay_current <= START_FRE;else if(neg_speed_down_en) beginif(stepper_work_en) stepper_delay_current <= stepper_delay_target;else stepper_delay_current <= START_FRE;endelse if(motor_speed_change) beginif(stepper_work_en) beginif(speed_up_en) stepper_delay_current <= speed_up_start + delta_speed_up_pulse;else if(speed_down_en) stepper_delay_current <= stepper_delay_target + delta_speed_down_pulse;else stepper_delay_current <= stepper_delay_target;endelse beginif(speed_down_en) stepper_delay_current <= START_FRE + delta_speed_down_pulse;else stepper_delay_current <= START_FRE;endendwire[19:0] stepper_delay_current_period;
wire[31:0] div_result; div_gen_0 uut_div_gen_0 (.clock ( clk ),.denom ( stepper_delay_current ),.numer ( CLK_NUMER_PERIORD ),.quotient ( div_result ),.remain ( ));assign stepper_delay_current_period = div_result[19:0]; reg[19:0] r_stepper_delay_current_period; //步进电机驱动周期锁存
always @(posedge clk or negedge rst_n)if(!rst_n) r_stepper_delay_current_period <= 1'd0;else if(stepper_cnt == 20'd0) r_stepper_delay_current_period <= stepper_delay_current_period; //步进电机时钟频率的计数
always @(posedge clk or negedge rst_n)if(!rst_n) stepper_cnt <= 20'd0;else if(stepper_cnt < r_stepper_delay_current_period[19:0]) stepper_cnt <= stepper_cnt+1'b1;else stepper_cnt <= 20'd0;//步进电机时钟频率产生
always @(posedge clk or negedge rst_n)if(!rst_n) stepper_motor_clk <= 1'b0;else if(stepper_cnt < {1'b0,r_stepper_delay_current_period[19:1]}) stepper_motor_clk <= 1'b0;else stepper_motor_clk <= 1'b1;endmodule这篇关于FPGA驱动步进电机-Sin曲线加速的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







