本文主要是介绍人工智能经典问题,八数码问题求解,启发式搜索法(Astar算法),C语言版,保证看懂,分析到位,注释详细,没有bug,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、问题描述
- 3*3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空。
- 要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态(图左)到目标状态(图右)。

二、迟来的代码
// 备注:曼哈顿距离等于当前状态与目标状态的水平距离和垂直距离之和#include <stdio.h> #include <stdlib.h> #include <time.h> #include <math.h>#define N 3 // 阶数,可以改为更高阶// 定义一个结构体来表示棋盘状态 typedef struct node {int cost; // 从初始状态到本状态的代价int data[N][N]; // 存放棋盘状态struct node *prev; // 链表中的前指针struct node *next; // 链表中的后指针struct node *father;// 搜索树的父节点 }node;node *open; // open表,存放未拓展的节点 node *close; // close表,存放已经拓展的节点 static int n = 0; // 用来记录总共搜索的次数int src[N][N] = {2, 8, 3, 1, 0, 4, 7, 6, 5}; // 初始状态 int cur[N][N]; // 当前状态 int dest[N][N] = {1, 2, 3, 8, 0, 4, 7, 6, 5}; // 目标状态// 生成一个节点 node *initList() {int i, j;node *p = malloc(sizeof(node));if(!p){printf("malloc fail\n");return NULL;}p->prev = p;p->next = p;p->father = NULL;p->cost = 0;// 初始化棋盘状态for(i = 0; i < N; i++){for(j = 0; j < N; j++){p->data[i][j] = -1;}}return p; }// 头插法,把节点插入到链表头部 void head_insert(node *head, node *p) {p->next = head->next;p->prev = head;head->next->prev = p;head->next = p; }// 尾插法,把节点插入到链表尾部 void tail_insert(node *head, node *p) {p->prev = head->prev;head->prev->next = p;p->next = head;head->prev = p; }// 弹出节点 void Remove(node *p) {p->prev->next = p->next;p->next->prev = p->prev;p->next = p;p->prev = p; }// 清空链表 void clearList(node *head) {// 空表不需要再清空if(!head || head->next == head){printf("list is null\n");return;}// 头删法,跟头插法相似,循环删除首元节点for(node *p = head->next; p != head; p = head->next){Remove(p); // 弹出节点pfree(p); // 释放节点p的空间} }// 初始化棋盘 void init() {int i, j, k;int a[N*N] = {1, 2, 3, 8, 0, 4, 7, 6, 5};int flag[N*N] = {0}; // 用来标记0~8中哪个数字已经出现过srand(time(0));for(i = 0; i < N; i++){for(j = 0; j < N; j++){// 尝试生成一个0~8间的数字k = rand()%(N*N);while(1){// 如果该数字未出现if(flag[k] == 0) {flag[k] = 1; // 修改标志位src[i][j] = a[k]; // 初始化对应src的位置break;}// 重新生成数字k = rand()%(N*N);}} } }// 复制棋盘状态 void copy(int source[N][N], int dest1[N][N]) {int i, j;for(i = 0; i < N; i++){for(j = 0; j < N; j++){dest1[i][j] = source[i][j];}} }// 打印棋盘状态 void display(int s[N][N]) {int i, j;for(i = 0; i < N; i++){for(j = 0; j < N; j++){// 把0当做空格输出if(s[i][j] > 0){printf("%d ", s[i][j]);}else if(s[i][j] == 0){printf(" ");}}printf("\n");} }// 寻找出棋盘中的空格键 void findSpace(int s[N][N], int *x, int *y) {int i, j;for(i = 0; i < N; i++){for(j = 0; j < N; j++){if(s[i][j] == 0) // 找到空格{*x = i;*y = j;}}} }// 空格上移 void up(int s[N][N], int x, int y) {// 空格必须是处于第2行或者第3行,才能上移if(x >= 1){s[x][y] = s[x-1][y];s[x-1][y] = 0;} }// 空格下移 void down(int s[N][N], int x, int y) {// 空格必须是处于第1行或者第2行,才能下移if(x <= 1){s[x][y] = s[x+1][y];s[x+1][y] = 0;} }// 空格左移 void left(int s[N][N], int x, int y) {// 空格必须是处于第2列或者第3列,才能左移if(y >= 1){s[x][y] = s[x][y-1];s[x][y-1] = 0;} }// 空格右移 void right(int s[N][N], int x, int y) {// 空格必须是处于第1列或者第2列,才能右移if(y <= 1){s[x][y] = s[x][y+1];s[x][y+1] = 0;} }// 采用曼哈顿距离,计算从某个状态cmp到当前状态的代价 // 曼哈顿距离指,与目标位置的水平距离和垂直距离之和 // 书上给出的代价是从起始节点S到任一节点i的路径代价g(i) // 修改代价时,采用g(j) = g(i) + cost(i, j); // cost(i, j)指从当前i节点到它的后继节点j的代价 // 但是这里因为每次空格操作,只会改变2个位置 // 所以cost(i, j)都相同,因此可以省略,直接计算g(j) void compute_cost(node *p, int cmp[N][N]) {int i, j, m, n;for(i = 0; i < N; i++){for(j = 0; j < N; j++){// 如果有对应位置不匹配的// 则重头搜索出与cmp[i][j]匹配的p->data[m][n]if(p->data[i][j] != cmp[i][j]){for(m = 0; m < N; m++){for(n = 0; n < N; n++){// 搜索到与cmp[i][j]匹配的p->data[m][n]// 计算曼哈顿距离后立马结束搜索if(p->data[m][n] == cmp[i][j]){// 累加每个位置的曼哈顿距离p->cost += abs(m-i) + abs(n-j);m = N; // 修改m值,结束搜索break;}}}}}} }// 检查close表中是否有重复的状态 int checkSame(int cmp[N][N]) {int i, j;node *p;for(p = close->next; p != close; p = p->next){for(i = 0; i < N; i++){for(j = 0; j < N; j++){if(p->data[i][j] != cmp[i][j]){i = N + 1;break;}}}if(i == N && j == N){return 1;}}return 0; }// 检查当前棋盘状态是否为目标状态 int checkWin() {int i, j;for(i = 0; i < N; i++){for(j = 0; j < N; j++){// 检测到有不同的就立马返回,节省时间if(cur[i][j] != dest[i][j]){return 0;}}}return 1; }// 打印从初始状态到目标状态的路径 void showWin() {int i = 1;node *p, *win;// 创建一个win表,用来存放路径win = initList(); if(!win){printf("win malloc fail\n");return;}// 由于节点中只有father(父节点),而打印路径是从父节点开始的// 所以必须先从close表选择出正确的路径,因为close中可能存放不是正确路径的节点// 可以唯一确定的是 close->prev 一定是目的状态,由此循环往上寻找其父节点for(p = close->prev; p && p != close; p = p->father){Remove(p); // 从close表中弹出p节点head_insert(win, p); // 把p节点用头插法插入到win表中}printf("the solution as follow:\n");// 经过头插法创建的win表,一定是按从初始状态到目标状态的排序的for(p = win->next; p != win; p = p->next, i++){printf("step %d:\n", i);display(p->data);printf("\n");}clearList(win); // 清空win表free(win); // 内存回收 }// 把当前节点(tmp) 的后继节点插入到open表中 void add(node *tmp, int cmp[N][N]) {node *p = initList();if(!p){printf("malloc fail\n");return;}copy(cmp, p->data); // 复制棋盘状态p->father = tmp; // 修改父节点指针compute_cost(p, src); // 修改从初始状态到当前状态的代价compute_cost(p, dest); // 修改从当前状态到目标状态的代价head_insert(open, p); // BFS用尾插法,DFS用头插法 }// 从表中选择一个节点,使其代价p->cost最小 // 通常是从open表中选择,如果有多个点,则随便选一个 node *min_cost(node *head) {// 空表直接退出if(!head || head->next == head){return NULL;}node *p, *min;min = head->next; for(p = min->next; p != head; p = p->next){if(p->cost < min->cost){min = p;}}return min; }// 等代价搜索法 void Astar() {printf("start Astar\n");node *tmp;int x, y, k, cmp[N][N];add(NULL, src); // 把初始状态加入到open表中while(1){// 如果open表为空,就可以退出了if(open->next == open){printf("fail\n");return;}// 从open表中选择一个节点,使其代价p->cost最小tmp = min_cost(open);// 如果tmp为空,则说明open表为空// 但是一般不会出现,因为前面已经对open表进行判空处理// 这里写的原因就是特意为了增强算法的健壮性if(!tmp) {printf("fail\n");return;}Remove(tmp);tail_insert(close, tmp);printf("now go :%d\n", ++n);// 打印当前搜索出的棋盘状态copy(tmp->data, cur);printf("current:\n");display(cur);// 检测当前棋盘状态是否为目标状态if(checkWin()){printf("success\n\n");printf("solution as follow:\n");showWin();return;}k = 0; // 记录当前节点的后继节点个数findSpace(cur, &x, &y); // 寻找当前棋盘状态的空格坐标printf("try up\n");// 空格必须是处于第2行或者第3行,才能上移if(x >= 1){copy(cur, cmp); // 先复制当前状态cur到cmp中up(cmp, x, y); // cmp尝试向上移// 判断cmp上移后close表中是否有重复状态// 没有重复才可以把cmp状态加入到close表中if(checkSame(cmp) == 0){k++; // 当前节点的后继节点数加一add(tmp, cmp); // 把后继节点加入到open表中printf("can up\n");}}printf("try down\n");// 空格必须是处于第1行或者第2行,才能下移if(x <= 1){copy(cur, cmp); // 先复制当前状态cur到cmp中down(cmp, x, y); // cmp尝试向下移// 判断cmp下移后close表中是否有重复状态// 没有重复才可以把cmp状态加入到close表中if(checkSame(cmp) == 0){k++; // 当前节点的后继节点数加一add(tmp, cmp); // 把后继节点加入到open表中printf("can down\n");}}printf("try left\n");// 空格必须是处于第2列或者第3列,才能左移if(y >= 1){copy(cur, cmp); // 先复制当前状态cur到cmp中left(cmp, x, y); // cmp尝试向左移// 判断cmp左移后close表中是否有重复状态// 没有重复才可以把cmp状态加入到close表中if(checkSame(cmp) == 0){k++; // 当前节点的后继节点数加一add(tmp, cmp); // 把后继节点加入到open表中printf("can left\n");}}printf("try right\n");// 空格必须是处于第1列或者第2列,才能右移if(y <= 1){copy(cur, cmp); // 先复制当前状态cur到cmp中right(cmp, x, y); // cmp尝试向右移// 判断cmp右移后close表中是否有重复状态// 没有重复才可以把cmp状态加入到close表中if(checkSame(cmp) == 0){k++; // 当前节点的后继节点数加一add(tmp, cmp); // 把后继节点加入到open表中printf("can right\n");}}// 如果当前状态没有后继节点,应该从close表中删除该状态if(k == 0){Remove(tmp); // 弹出当前状态free(tmp); // 释放当前状态printf("del done\n\n");}} }int main() {open = initList(); // 初始化open表close = initList(); // 初始化close表if(!open || !close){printf("初始化状态失败\n");return -1;}// 测试阶段建议直接定义src, init()后的src很大程度上无解// init(); printf("src:\n");display(src);Astar();// 清空open表和close表并回收内存clearList(open);clearList(close);free(open);free(close);printf("DFS finish\n");return 0; }
运行截图


三、简单分析
如果认真且仔细看完代码的程序猿同学,根据注释的讲解,可以说基本上可以看懂了,下面再来讲解一下算法的流程图和关键易错点。
流程图:
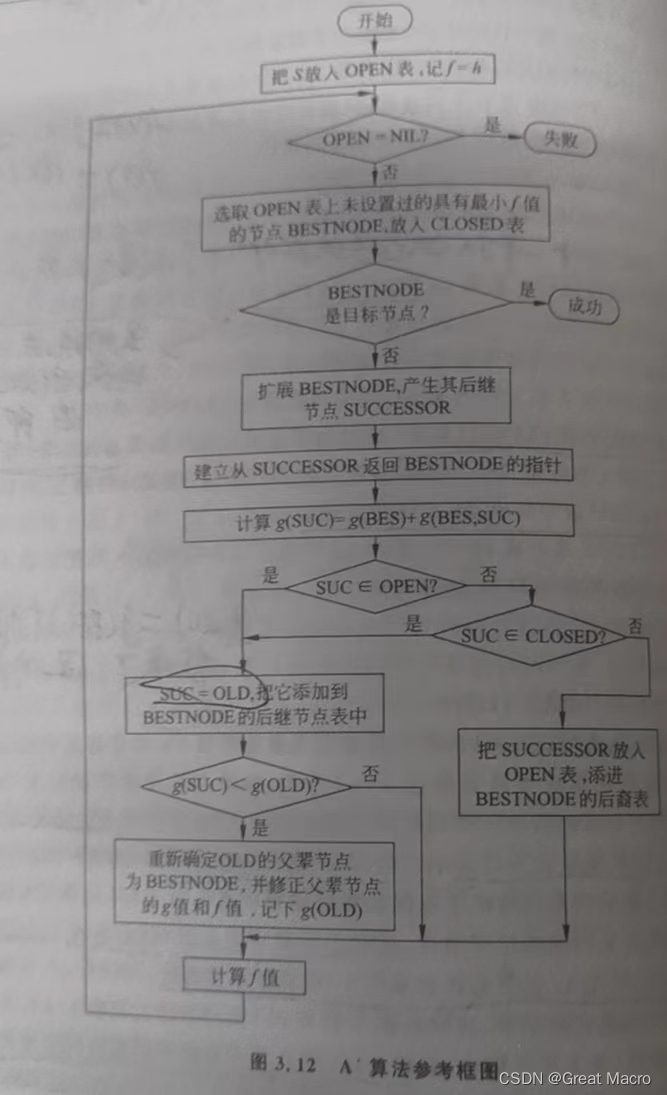
关键易错点:
1、open表用来存放未拓展的节点,close表用来存放已经拓展的节点,所以说,解的路径存放在close表中,但并不一定完全是close表中的节点,因为有些是其他不符合的节点。
2、注意区分节点中的数据结构,一个版本中father指针的作用是保留父节点的指针,方便打印解的路径,而prev和next的作用是用来方便节点在链表中的操作,所以说,可以采用数组的方式来存储,此时就不需要prev和next指针了,这里不详细展开。
3、算法结束的条件是:open表为空,即不存在任何后继节点了,此时为无解;或者当前状态就是目标状态,即找到了正确的解。
4、空格操作的选择顺序:算法中对上移,下移,左移,右移的先后顺序要统一,不同的上下左右移动顺序会影响解的路径的长度,这点需要程序猿同学自己画图理解一下,这里比较难说明。
5、如果存在解,则解的路径可能有多条,而使用BFS一定可以打印出一条最优解,注意用词是打印,不是搜索的过程是最优,而如果使用DFS则不一定可以打印出一条最优解,如果使用A*算法(启发式搜索)则可以保证搜索过程是最优的,自然就可以打印出一条最优解。
6、启发式搜索,每次总是选择最有希望的节点加以拓展。这里的代价计算为:从初始状态到当前状态的代价和当前状态到目标状态的代价之和,代价采用曼哈顿距离计算。
7、曼哈顿距离指,状态i与状态j之间水平距离和垂直距离之和。
四、小小总结
本期八数码启发式搜索求解做的有点急,但是给的代码中有一些编程小技巧,细心的可以看出来,记得收藏起来,下期出八数码A*算法求解, 敬请关注!^_^
这篇关于人工智能经典问题,八数码问题求解,启发式搜索法(Astar算法),C语言版,保证看懂,分析到位,注释详细,没有bug的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







