本文主要是介绍YOLOv5涨点必备!改进损失函数EIoU,SIoU,AlphaIoU,FocalEIoU,Wise-IoU,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一,改进损失函数的作用
二,具体实现
一,改进损失函数的作用
YOLOv5损失函数的作用是衡量预测框与真实框之间的差异,并根据这些差异来更新模型的参数。它帮助模型学习如何准确地检测和定位目标物体,从而提高检测的精度和准确性。
YOLOv5中的损失函数主要包括三个部分:目标分类损失、边界框坐标损失和对象置信度损失。
-
目标分类损失:该损失函数用于衡量预测框中的目标类别与真实框中的目标类别之间的差异。它使用交叉熵损失函数来计算分类误差,促使模型学习正确地分类各个目标物体。
-
边界框坐标损失:该损失函数用于衡量预测框中的边界框位置与真实框中的边界框位置之间的差异。一般采用平方损失函数或者IOU(交并比)损失函数来衡量边界框的位置偏移,以便模型能够准确地定位目标物体。
-
对象置信度损失:该损失函数用于衡量预测框中的对象置信度与真实框中的对象置信度之间的差异。对象置信度表示预测框中是否存在目标物体,它是检测算法中一个关键的指标。通过对对象置信度的损失函数进行优化,模型可以学习如何准确地判断预测框中是否有目标物体。
YOLOv5的损失函数综合考虑了目标分类、边界框位置和对象置信度这三个重要因素,它们共同构成了目标检测的关键要素。通过最小化损失函数,模型可以不断优化参数,提高目标检测的准确性和鲁棒性。
二,具体实现
YOLOv5默认的损失函数为CIoU,另外自带的还有GIoU以及DIoU,
文件路径:utils/metrics.py
函数名为:bbox_iou
原损失函数定义:
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)# Get the coordinates of bounding boxesif xywh: # transform from xywh to xyxy(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_else: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)# Union Areaunion = w1 * h1 + w2 * h2 - inter + eps# IoUiou = inter / unionif CIoU or DIoU or GIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squaredrho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha = v / (v - iou + (1 + eps))return iou - (rho2 / c2 + v * alpha) # CIoUreturn iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areareturn iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdfreturn iou # IoU
改为:把上面提及到的这个函数替换成以下
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, Focal=False, alpha=1, gamma=0.5, eps=1e-7):# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)# Get the coordinates of bounding boxesif xywh: # transform from xywh to xyxy(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_else: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)# Union Areaunion = w1 * h1 + w2 * h2 - inter + eps# IoU# iou = inter / union # ori iouiou = torch.pow(inter/(union + eps), alpha) # alpha iouif CIoU or DIoU or GIoU or EIoU or SIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - iou + (1 + eps))if Focal:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter/(union + eps), gamma) # Focal_CIoUelse:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)if Focal:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter/(union + eps), gamma) # Focal_EIouelse:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)if Focal:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_SIouelse:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouif Focal:return iou - rho2 / c2, torch.pow(inter/(union + eps), gamma) # Focal_DIoUelse:return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areaif Focal:return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdfelse:return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfif Focal:return iou, torch.pow(inter/(union + eps), gamma) # Focal_IoUelse:return iou # IoU
Alpha-IoU的介绍:
论文的名字很好,反映了本文的核心想法。作者将现有的基于IoU Loss推广到一个新的Power IoU系列 Loss,该系列具有一个Power IoU项和一个附加的Power正则项,具有单个Power参数α,称这种新的损失系列为α-IoU Loss。
函数特性:
文中,作者将现有的基于IoU Loss推广到一个新的Power IoU系列 Loss,该系列具有一个Power IoU项和一个附加的Power正则项,具有单个Power参数α。称这种新的损失系列为α-IoU Loss。在多目标检测基准和模型上的实验表明,α-IoU损失:
可以显著地超过现有的基于IoU的损失;
通过调节α,使检测器在实现不同水平的bbox回归精度方面具有更大的灵活性;
对小数据集和噪声的鲁棒性更强。
实验结果表明,α(α>1)增加了high IoU目标的损失和梯度,进而提高了bbox回归精度。
power参数α可作为调节α-IoU损失的超参数以满足不同水平的bbox回归精度,其中α >1通过更多地关注High IoU目标来获得高的回归精度(即High IoU阈值)。
**α对不同的模型或数据集并不过度敏感,在大多数情况下,α=3表现一贯良好。**α-IoU损失家族可以很容易地用于改进检测器的效果,在干净或嘈杂的环境下,不会引入额外的参数,也不增加训练/推理时间。
公式如下:
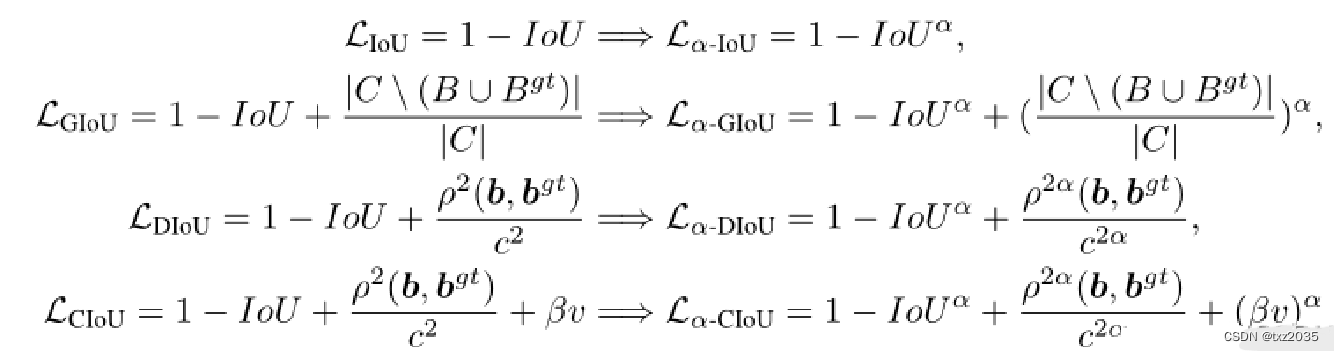
所以将 alpha 设置为1, 其实还是用的是原本的IOU,并没有加入alpha的属性,一般设置为3,
然后再把 iou改成你需要的,这样就组合而成了 alpha-ciou , alpha-Diou等等
注意:
- gamma参数是Focal_EIoU中的gamma参数,一般就是为0.5,有需要可以自行更改。
- alpha参数为AlphaIoU中的alpha参数,默认为1,1的意思就是跟正常的IoU一样,如果想采用AlphaIoU的话,论文alpha默认值为3。
- 跟Focal_EIoU一样,我认为AlphaIoU的思想同样可以用在其他的IoU变种上,简单来说就是如果你设置了alpha为3,其他IoU设定的参数(GIoU,DIoU,CIoU,EIoU,SIoU)为False的时候,那就是AlphaIoU,如果你设置了alpha为3,CIoU为True的时候,那就是
- 想用那个IoU变种,就直接设置参数为True即可
除了以上这个函数替换,还需要在utils/loss.py中ComputeLoss Class中的__call__函数中修改一下:
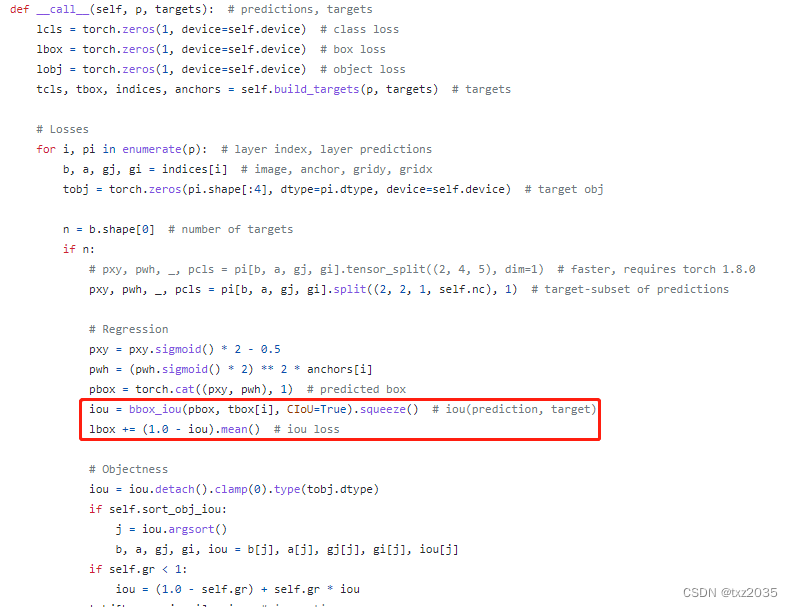
将红框代码替换为:
iou = bbox_iou(pbox, tbox[i], CIoU=True) # iou(prediction, target)
if type(iou) is tuple:lbox += (iou[1].detach().squeeze() * (1 - iou[0].squeeze())).mean()iou = iou[0].squeeze()
else:lbox += (1.0 - iou.squeeze()).mean() # iou lossiou = iou.squeeze()
最后修改参数就在调用bbox_iou中进行修改即可,比如上面的代码就是使用了CIoU,如果你想使用Focal_EIoU那么你可以修改为下:
iou = bbox_iou(pbox, tbox[i], EIoU=True, Focal=True)
这篇关于YOLOv5涨点必备!改进损失函数EIoU,SIoU,AlphaIoU,FocalEIoU,Wise-IoU的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





