本文主要是介绍slambook2(ch3)—— Ubuntu18.04安装eigen库 + Pangolin库 + 例程演示,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Ubuntu18.04安装eigen库+例程演示
- 安装Eigen库
- 引用设置
- 一、终端操作
- 二、例程演示
- 1、编译运行
- 2、使用kdevelop编译运行
- 安装Pangolin
- 一、安装Pangolin所需依赖
- 二、获取Pangolin源码
- 三、检查是否安装成功
- 四、例程演示(排错)
- 解决error while loading shared libraries: libXXX.so.X: cannot open shared object file: No such file
- 1、更改配置文件
- 2、临时解决方案(关闭终端需要重新配置)
- 解决cannot find trajectory file at ./examples/trajectory.txt
- 最终结果
- 五、ch3_3.7.2显示相机位姿(P69)
- 错误
- 原因
- 解决方法
安装Eigen库
直接安装
sudo apt-get install libeigen3-dev
sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen
引用设置
如果需要引用对应的include目录,使用一下目录:
/usr/include/eigen3
一、终端操作

二、例程演示
//终端按顺序输入如下命令
//程序所在位置slambook2/ch31. cd useEigen2. mkdir build3. cd build4. cmake ..5. make6. ./eigenMatrix1、编译运行
结果展示

2、使用kdevelop编译运行
熟悉一下kdevelop

安装Pangolin
一、安装Pangolin所需依赖
1. sudo apt install libgl1-mesa-dev
2. sudo apt install libglew-dev
3. sudo apt install cmake
4. sudo apt install libpython2.7-dev
5. sudo apt install python-pip
6. sudo python -mpip install numpy pyopengl Pillow pybind11
7. sudo apt install pkg-config
8. sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
9. sudo apt install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev
10. sudo apt install libdc1394-22-dev libraw1394-dev
11. sudo apt install libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev
二、获取Pangolin源码
默认git版本为0.6
git clone https://github.com/stevenlovegrove/Pangolin.git
三、检查是否安装成功
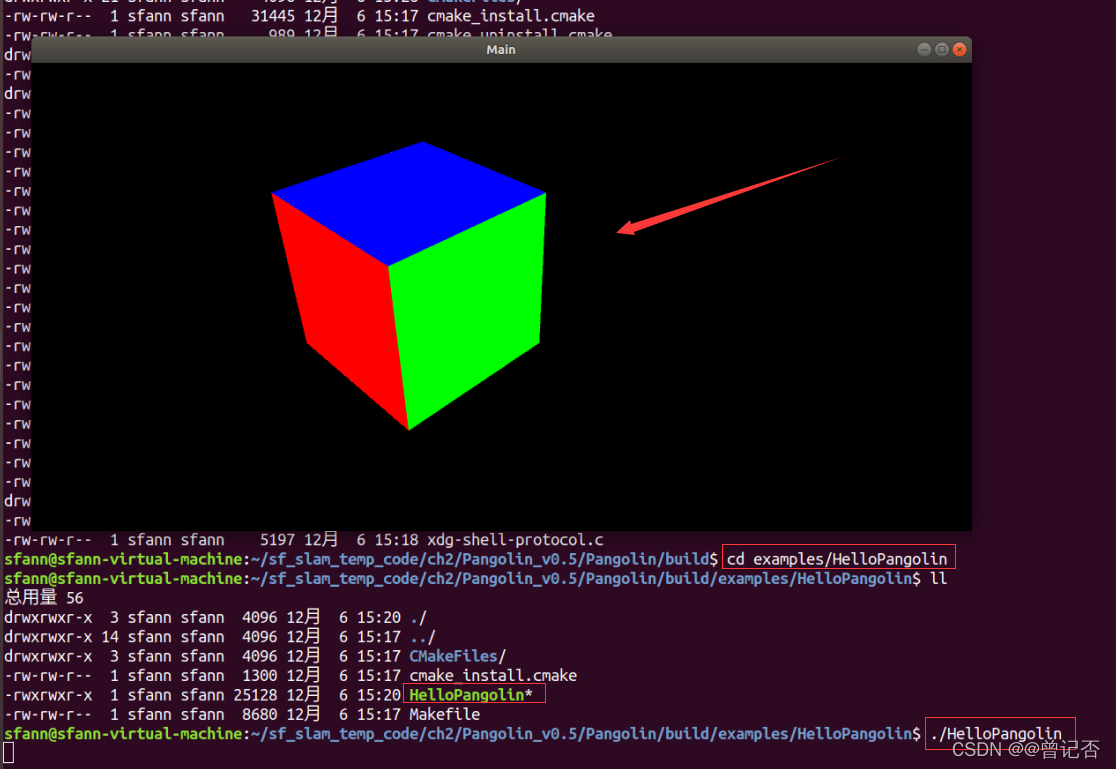
编译完,可以运行以下命令测试,如果显示出一个彩色立方体,并且可以通过鼠标左、右键和滚轮按住拖拽,就表示 Pangolin 安装成功了。
1. cd examples/HelloPangolin
2. ./HelloPangolin
四、例程演示(排错)
解决error while loading shared libraries: libXXX.so.X: cannot open shared object file: No such file
原因一般有两个,一个是操作系统里确实没有包含该共享库(lib*.so.*文件)或者共享库版本不对,遇到这种情况那就去网上下载并安装上即可。
另外一个原因就是已经安装了该共享库,但执行需要调用该共享库的程序的时候,程序按照默认共享库路径找不到该共享库文件。

如上图,编译、执行示例代码时报该错,但在目录/usr/local/lib下我们可以看到libpango_core.so是存在的:
1、更改配置文件
一般安装目录在
/usr/local/lib
将该目录加入到共享库的配置文件中
echo "/usr/local/lib" >> /etc/ld.so.conf //在新的一行中加入库文件所在目录ldconfig //更新/etc/ld.so.cache文件
2、临时解决方案(关闭终端需要重新配置)
export LD_LIBRARY_PATH=/usr/local/mysql/lib:$LD_LIBRARY_PATH
本文先采用——————临时解决方案


可能是前两次添加的环境变量路径有误,重新添加下面的环境变量成功!!!!
export LD_LIBRARY_PATH=/usr/local/lib
解决cannot find trajectory file at ./examples/trajectory.txt
找不到.txt文件位置,只需在.cpp文件中进行修改文件路径即可。

打开KDevelop在plotTrajectory.cpp修改.txt文件位置。如下图所示:
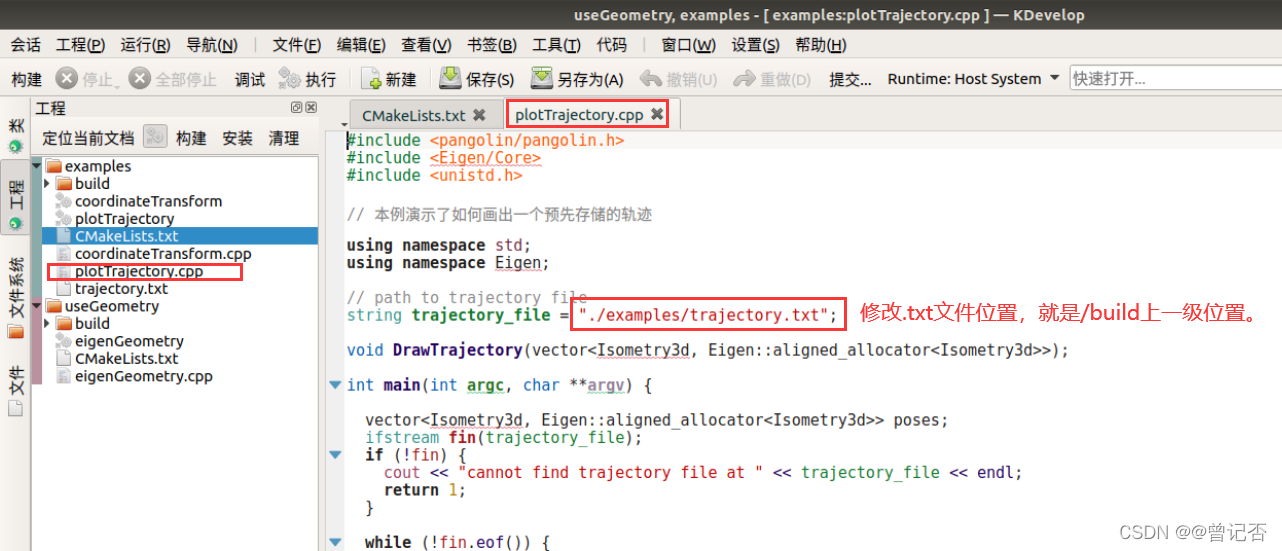
注意也可以改为相对路径
string trajectory_file = "../trajectory.txt"
注意修改完后进行保存

进行重新编译运行!!!!!
切换到plotTrajectory所在目录
mkdir build
cd build
cmake ..
make
最终结果

五、ch3_3.7.2显示相机位姿(P69)
错误
报了一大堆错如下:
/usr/local/include/sigslot/signal.hpp: In member function ‘void sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::clean(sigslot::detail::slot_state*)’:
/usr/local/include/sigslot/signal.hpp:1504:46: error: ‘m_slots’ was not declared in this scopefor (auto &group : detail::cow_write(m_slots)) {^~~~~~~
/usr/local/include/sigslot/signal.hpp:1504:46: note: suggested alternative: ‘m_block’for (auto &group : detail::cow_write(m_slots)) {^~~~~~~m_block
/usr/local/include/sigslot/signal.hpp: In member function ‘void sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::add_slot(sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::slot_ptr&&)’:
/usr/local/include/sigslot/signal.hpp:1538:42: error: ‘m_slots’ was not declared in this scopeauto &groups = detail::cow_write(m_slots);^~~~~~~
/usr/local/include/sigslot/signal.hpp:1538:42: note: suggested alternative: ‘m_block’auto &groups = detail::cow_write(m_slots);^~~~~~~m_block
/usr/local/include/sigslot/signal.hpp: In member function ‘size_t sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::disconnect_if(Cond&&)’:
/usr/local/include/sigslot/signal.hpp:1560:42: error: ‘m_slots’ was not declared in this scopeauto &groups = detail::cow_write(m_slots);^~~~~~~
/usr/local/include/sigslot/signal.hpp:1560:42: note: suggested alternative: ‘m_block’auto &groups = detail::cow_write(m_slots);^~~~~~~m_block
/usr/local/include/sigslot/signal.hpp:1564:28: error: range-based ‘for’ expression of type ‘auto’ has incomplete typefor (auto &group : groups) {^~~~~~
/usr/local/include/sigslot/signal.hpp: In member function ‘void sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::clear()’:
/usr/local/include/sigslot/signal.hpp:1584:27: error: ‘m_slots’ was not declared in this scopedetail::cow_write(m_slots).clear();^~~~~~~
/usr/local/include/sigslot/signal.hpp:1584:27: note: suggested alternative: ‘m_block’detail::cow_write(m_slots).clear();^~~~~~~m_block
/usr/local/include/sigslot/signal.hpp: In instantiation of ‘void sigslot::signal_base< <template-parameter-1-1>, <template-parameter-1-2> >::operator()(U&& ...) [with U = {pangolin::VarState::Event}; Lockable = std::mutex; T = {pangolin::VarState::Event}]’:
/usr/local/include/pangolin/var/varstate.h:264:23: required from ‘std::map<std::__cxx11::basic_string<char>, std::shared_ptr<pangolin::VarValueGeneric> >::iterator pangolin::VarState::AddUpgradedVar(const std::shared_ptr<pangolin::VarValue<T> >&, const iterator&, bool) [with T = bool; std::map<std::__cxx11::basic_string<char>, std::shared_ptr<pangolin::VarValueGeneric> >::iterator = std::_Rb_tree_iterator<std::pair<const std::__cxx11::basic_string<char>, std::shared_ptr<pangolin::VarValueGeneric> > >]’
/usr/local/include/pangolin/var/varstate.h:205:13: required from ‘std::shared_ptr<pangolin::VarValueGeneric> pangolin::VarState::GetOrCreateVar(const T&, const pangolin::VarMeta&) [with T = bool]’
/usr/local/include/pangolin/var/var.h:83:50: required from ‘pangolin::Var<T>::Var(const T&, const pangolin::VarMeta&) [with T = bool]’
/usr/local/include/pangolin/var/var.h:88:35: required from ‘pangolin::Var<T>::Var(const string&, const T&) [with T = bool; std::__cxx11::string = std::__cxx11::basic_string<char>]’
/usr/local/include/pangolin/display/widgets.h:153:50: required from here
/usr/local/include/sigslot/signal.hpp:1180:65: error: ‘slots_reference’ was not declared in this scopecow_copy_type<list_type, Lockable> ref = slots_reference();~~~~~~~~~~~~~~~^~
CMakeFiles/visualizeGeometry.dir/build.make:81: recipe for target 'CMakeFiles/visualizeGeometry.dir/visualizeGeometry.cpp.o' failed
make[2]: *** [CMakeFiles/visualizeGeometry.dir/visualizeGeometry.cpp.o] Error 1
CMakeFiles/Makefile2:94: recipe for target 'CMakeFiles/visualizeGeometry.dir/all' failed
make[1]: *** [CMakeFiles/visualizeGeometry.dir/all] Error 2
Makefile:102: recipe for target 'all' failed
make: *** [all] Error 2原因
原因是安装Pangolin时直接
git clone https://github.com/stevenlovegrove/Pangolin.git
此方法下载的是最新版本的Pangolin(目前是Pangolin0.6)而Pangolin0.6用的是C++17标准编译。而ORB_SLAM2 和 slambook2 的代码用的还是C++11,因此报了一大堆不明error(具体为什么恐怕得等去深入了解下C++17和C++11的区别才能说明)
解决方法
解决方法是:去https://github.com/stevenlovegrove/Pangolin找到0.5版本的Pangolin 把源码下载下来或者去进入文件夹slambook2/3rdparty安装,然后再:
解压
cd Pangolin
mkdir build && cd build
cmake ..
make -j2
sudo make install
这篇关于slambook2(ch3)—— Ubuntu18.04安装eigen库 + Pangolin库 + 例程演示的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









