本文主要是介绍虚幻4渲染编程(物理模拟篇)【第一卷:Introduce my Physic plugin】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
MY BLOG DIRECTORY:
YivanLee:专题概述及目录INTRODUCTION:
虽然虚幻4给我们提供了物理的解决方案,但是这些方案其实还是不够完善,很多上层功能性的物理特性还是需要基于Unreal的物理接口再次开发的。这卷我将基于Unreal的物理引擎接口开发更加上层的物理特性。
以下的效果是我开发的PhyGX插件目前的部分功能。比如我们有时候需要一个物理蜘蛛网:
再比如我们有时候需要一片物理草地
或者需要什么更上层的功能,这时候就需要对引擎的物理功能根据项目需求进行拓展。为什么叫PhyGX呢,因为接下来我开发的物理插件就叫PhyGX(自己瞎取的名)。
MAIN CONTENT:
其实在我之前的文章里也有提到过,首先我们构造出一些动力学粒子和约束,然后结算它们,把最后的解算结果用来构建动态网格,然后把网格数据塞的渲染管线里就好了。这个可以看我之前的文章:
YivanLee:虚幻4渲染编程(图元汇编篇)【第五卷:游戏中的动力学模拟】
YivanLee:虚幻4渲染编程(环境模拟篇)【第五卷:可交互物理植被模拟 - 上】
刚体运动模拟就是使用韦尔莱算法,如果想模拟软体就是需要在约束上下功夫了。目前我实现的约束有四种:
DistanceConstraint,AngularConstraint,DistanceAngularConstraint,PinConstraint
VeletParticle.h
#pragma once#include "EngineMinimal.h"
#include "UObject/ObjectMacros.h"
#include "Engine/EngineTypes.h"/
//PinConstraint
struct FPinConstraint
{FPinConstraint(){bFree = true;bLockX = false;bLockY = false;bLockZ = false;}FPinConstraint(bool bfreeval, bool blockxval, bool blockyval , bool blockzval):bFree(bfreeval),bLockX(blockxval),bLockY(blockyval),bLockZ(blockzval){}bool bFree;bool bLockX;bool bLockY;bool bLockZ;
};/
//Verlet Paticle
struct FVerletParticle
{
public:FVerletParticle() {bUseLocalForce = false;ParticleFraction = 1.0f;}void InitVerletParticle(FVector CurPosValue, FVector OldPosValue, bool bFreeValue = true, bool bLockXValue = false, bool bLockYValue = false, bool bLockZValue = false,float Fraction = 1.0f){CurPos = CurPosValue;OldPos = OldPosValue;PinCons.bFree = bFreeValue;PinCons.bLockX = bLockXValue;PinCons.bLockY = bLockYValue;PinCons.bLockZ = bLockZValue;ParticleFraction = Fraction;}// If Using this function vertion particle will use it's own force directionvoid InitVerletParticle(FVector CurPosValue,FVector OldPosValue,FVector Force,bool bFreeValue = true,bool bLockXValue = false,bool bLockYValue = false,bool bLockZValue = false,float Fraction = 1.0f){CurPos = CurPosValue;OldPos = OldPosValue;LocalForceDir = Force;PinCons.bFree = bFreeValue;PinCons.bLockX = bLockXValue;PinCons.bLockY = bLockYValue;PinCons.bLockZ = bLockZValue;ParticleFraction = Fraction;bUseLocalForce = true;}FVector CurPos;FVector OldPos;FVector LocalForceDir;FPinConstraint PinCons;float ParticleFraction;void SolvePinConstraint();bool GetbUseLocalForce() { return bUseLocalForce; }private:bool bUseLocalForce;};/
//DistanceConstraint
struct FDistanceConstraint
{FDistanceConstraint(){}FDistanceConstraint(FVerletParticle* A, FVerletParticle* B, float DesiDistanceValue):ParticleA(A), ParticleB(B), DistanceLength(DesiDistanceValue){}//The Range of the SoftFactor is [0, 1]void InitDistanceConstraint(FVerletParticle& A, FVerletParticle& B, float distance, float SoftFactor = 1.0f){ParticleA = &A;ParticleB = &B;DistanceLength = distance;SoftStrenth = SoftFactor;}void SolveDistanceConstraint();FVerletParticle* ParticleA;FVerletParticle* ParticleB;float DistanceLength;//The Range of the SoftStrenth is [0, 1]float SoftStrenth;
};/
//AngularConstraint
struct FAngularConstraint
{FAngularConstraint(){}FAngularConstraint(FVerletParticle* A, FVerletParticle* B, FVerletParticle* C, float AngularSizeValue):ParticleA(A), ParticleB(B), ParticleC(C), AngularSize(AngularSizeValue){}//If we don't use distance angular constraint,use this function to initvoid InitAngularConstraint(FVerletParticle& A, FVerletParticle& B, FVerletParticle& C, float AngularSizeValue){ParticleA = &A;ParticleB = &B;ParticleC = &C;AngularSize = AngularSizeValue;bUseDistanceAngularConstraint = false;}//If we use distance angular constraint, we shoule use this vertion function to initvoid InitAngularConstraint(FVerletParticle& A, FVerletParticle& B, FVerletParticle& C,float AngularSizeValue,float EdgeASize, float EdgeBSize, float angularsoft){ParticleA = &A;ParticleB = &B;ParticleC = &C;AngularSize = AngularSizeValue;AngularSoftStrenth = angularsoft;bUseDistanceAngularConstraint = true;DistanceAngularEdgeALength = EdgeASize;DistanceAngularEdgeBLength = EdgeBSize;}//This is first type angular constraint,it is not a good solve wayvoid SolveAngularConstraint();//The second Solve Angular constraint way, very simple but usefulvoid SolveDistanceAngularConstraint();//These data is for distance angular constraint//The range of the AngularSoftStrenth is [0, 1]float AngularSoftStrenth;float DistanceAngularEdgeALength;float DistanceAngularEdgeBLength;bool bUseDistanceAngularConstraint;//Three particle pointer of this angular constraintFVerletParticle* ParticleA;FVerletParticle* ParticleB;FVerletParticle* ParticleC;//The angle to limitedfloat AngularSize;}; VeletParticle.cpp
#include "VerletParticle.h"void FVerletParticle::SolvePinConstraint()
{if (PinCons.bLockX){CurPos.X = OldPos.X;}if (PinCons.bLockY){CurPos.Y = OldPos.Y;}if (PinCons.bLockZ){CurPos.Z = OldPos.Z;}
}void FDistanceConstraint::SolveDistanceConstraint()
{if ((ParticleA != nullptr && ParticleB != nullptr)&&(ParticleA->PinCons.bFree || ParticleB->PinCons.bFree)){// Find current vector between particlesFVector Delta = ParticleB->CurPos - ParticleA->CurPos;// float CurrentDistance = Delta.Size();float ErrorFactor = (CurrentDistance - DistanceLength) / CurrentDistance * SoftStrenth;// Only move free particles to satisfy constraintsif (ParticleA->PinCons.bFree && ParticleB->PinCons.bFree){ParticleA->CurPos += ErrorFactor * 0.5f * Delta;ParticleB->CurPos -= ErrorFactor * 0.5f * Delta;}else if (ParticleA->PinCons.bFree){ParticleA->CurPos += ErrorFactor * Delta;}else if (ParticleB->PinCons.bFree){ParticleB->CurPos -= ErrorFactor * Delta;}}
}void FAngularConstraint::SolveAngularConstraint()
{if ((ParticleA != nullptr && ParticleB != nullptr && ParticleC !=nullptr) && (ParticleA->PinCons.bFree || ParticleC->PinCons.bFree)){FVector a = ParticleA->CurPos - ParticleB->CurPos;FVector b = ParticleC->CurPos - ParticleB->CurPos;float theta = acos(dot(a, b) / (length(a) * length(b))) * 180.0f / 3.1415926f;if (theta > AngularSize) return;float dif = theta - AngularSize;float ErrorFactor = (theta - AngularSize) / (theta + 0.0001);if (dif < -360.0f){dif += 360;}else if (dif > 360.0f){dif -= 360.0f;}FVector Axi = cross(a, b).GetSafeNormal();float ConstraintStrenth = 0.007f;if (ParticleA->PinCons.bFree && ParticleC->PinCons.bFree){ParticleA->CurPos += (ParticleA->CurPos.RotateAngleAxis(dif * ErrorFactor * 0.5f, Axi)) * ConstraintStrenth * 0.5f;ParticleC->CurPos -= (ParticleC->CurPos.RotateAngleAxis(-dif * ErrorFactor * 0.5f, Axi)) * ConstraintStrenth * 0.5f;}else if (ParticleA->PinCons.bFree){ParticleA->CurPos += (ParticleA->CurPos.RotateAngleAxis(dif * ErrorFactor, Axi)) * ConstraintStrenth;}else if (ParticleC->PinCons.bFree){ParticleC->CurPos -= (ParticleC->CurPos.RotateAngleAxis(-dif * ErrorFactor, Axi)) * ConstraintStrenth;}}
}void FAngularConstraint::SolveDistanceAngularConstraint()
{if ((ParticleA != nullptr && ParticleB != nullptr && ParticleC != nullptr)&& (ParticleA->PinCons.bFree || ParticleC->PinCons.bFree)){float la = DistanceAngularEdgeALength;float lb = DistanceAngularEdgeBLength;float lc = sqrt(la*la + lb * lb - 2 * la*lb*cos(AngularSize));// Find current vector between particlesFVector Delta = ParticleA->CurPos - ParticleC->CurPos;// float CurrentDistance = Delta.Size();float ErrorFactor = (CurrentDistance - lc) / CurrentDistance * AngularSoftStrenth;// Only move free particles to satisfy constraintsif (ParticleA->PinCons.bFree && ParticleC->PinCons.bFree){ParticleA->CurPos -= ErrorFactor * 0.5f * Delta;ParticleC->CurPos += ErrorFactor * 0.5f * Delta;}else if (ParticleA->PinCons.bFree){ParticleA->CurPos -= ErrorFactor * Delta;}else if (ParticleC->PinCons.bFree){ParticleC->CurPos += ErrorFactor * Delta;}}
} 这便是构造物体最基础的Particle和四种Constraint的代码了,目前还非常简单,没有加入太多的物理量。
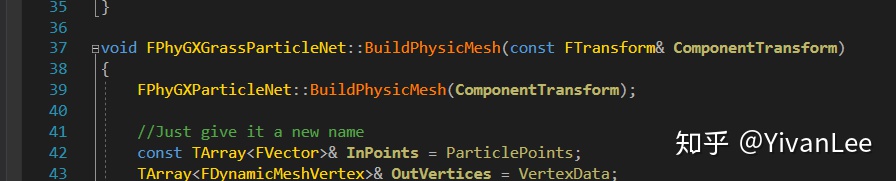
有了最基础的Particle,下一步就是构造动力学网格ParticleNet
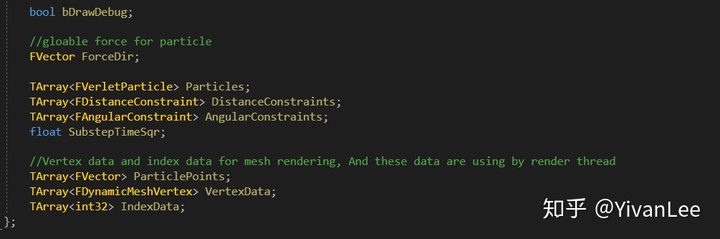
ParticleNet由各种Constraint,一堆约束和一堆渲染所用的数据组成,在ParticleNet里需要完成粒子网格的构建和动态模型的构建,然后在把这些数据塞给SceneProxy即可

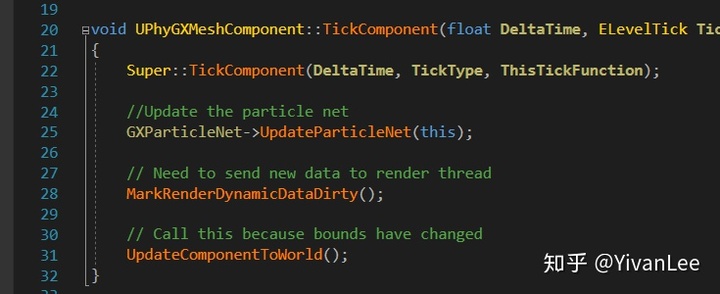
最后再在MeshComponent中把SceneProxy和ParticleNet组合到一起,在Tick函数中不停让ParticleNet更新数据
ParticleNet需要对Point的位置进行动力学解算,下面这段解算公式是通用的。代码中的Force可以是任何力,默认情况下物体受到一个重力。对于重力,这个值是一直不变的,但是可以把它的值进行动态变换。
void FPhyGXParticleNet::VerletInstigation()
{for (int32 ParticleIndex = 0; ParticleIndex < Particles.Num(); ParticleIndex++){FVerletParticle& Particle = Particles[ParticleIndex];if (Particle.PinCons.bFree){FVector Force = FVector(0, 0, 0);if (Particle.GetbUseLocalForce() == true){//Local forceForce = Particle.LocalForceDir;}//Use global force to caculateelseForce = ForceDir;// Find velconst FVector Vel = Particle.CurPos - Particle.OldPos;// Update positionconst FVector NewPosition = Particle.CurPos + (Vel + (SubstepTimeSqr * Force)) * Particle.ParticleFraction;Particle.OldPos = Particle.CurPos;Particle.CurPos = NewPosition;}}
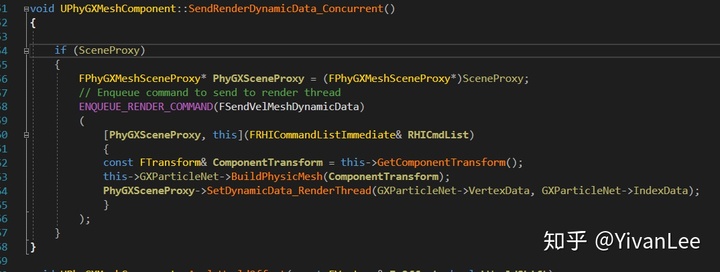
} 在SendRenderDynamicData_Concurrent()函数中把ParticleNet的渲染数据塞给SceneProxy
这样就可以在UE中进行我们自己的物理引擎插件的开发了。完整代码我会在后面的章节中放出。
SUMMARY AND OUTLOOK:
如果不进行VB和IB的Buffer拷贝修改操作的话,其实仅仅是模拟物理那部分计算量还是比较小的。
Enjoy it。
NEXT:
YivanLee:虚幻4渲染编程(物理模拟篇)【第二卷:Soft Body Simulation】
这篇关于虚幻4渲染编程(物理模拟篇)【第一卷:Introduce my Physic plugin】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







