本文主要是介绍天线共形飞艇的盘旋飞行控制设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
摘 要:天线共形飞艇携带雷达在空中抵近侦察时,在指定空域进行盘旋飞行,其盘旋飞行性能直接影响 搭载的雷达性能,为实现控制飞艇在盘旋飞行时的航线位置跟踪、姿态稳定,建立了含风场特性的通用六自由度 非线性模型,并利用小扰动线性化方法将运动模型线性化。在此基础上,本文针对该飞行场景设计一种外环基 于自适应 PID+内环线性自抗扰法的双闭环盘旋飞行控制方法,并经过实际飞行验证,证明了控制方法的有效 性,给出飞艇实际空中盘旋飞行姿态波动范围,为后续天线共形飞艇搭载雷达提供设计参考。
关键词:天线共形飞艇;盘旋飞行;自抗扰控制
Hovering Flight Control Design for Antenna Conformal Airships ZHANG Lei, JIN Erdong, GUO Zhiwei (The 38th Research Institute of China Electronics Technology Group Corporation, Hefei 230088, China) Abstract: When antenna conformal airships carry radar to perform reconnaissance in air, its performance of hover⁃ ing flight directly affects the performance of radar on board. In order to control the airship’s airline position tracking and attitude stability during hovering flight, a general six⁃degree⁃of⁃freedom nonlinear model with wind field characteristics is established, and the motion model is linearized by using the small disturbance linearization method. On this basis, a method based on adaptive PID+LADRC for hovering flight is designed in this paper. Through the actual flight verifica⁃ tion, the effectiveness of the control method has been demonstrated. The attitude fluctuation range is given when the air⁃ ship makes hovering flight. The research is beneficial for the antenna conformal airships carrying radar. Key words: antenna conformal airship; hovering flight; auto⁃disturbance rejection control(ADRC)
0 引 言
飞艇由气囊构成的艇体、起稳定作用的舵面、 载重用的吊舱和动力推进设备组成。艇体内一般 充有低密度的惰性气体氦气,以产生浮力。飞艇 具有续航时间长、功耗低、噪音小、污染少等特点, 是一种安全环保、经济可靠的飞行器,具有重要的 研究意义和应用价值[1] 。飞艇是一种优良的雷达 载体平台,为了不影响飞行器的外形形状和严格 的空气动力学性能及达到宽的波束扫描角范围, 一般将雷达柔性阵面天线与飞艇两侧部分囊体共 形。现有文献关于天线共形飞艇飞行姿态对雷达 性能影响分析较少,文献[2]说明对于双基雷达, 实际飞行状态不可避免的影响其检测性能,并从航线、俯仰、偏航三个方面进行研究。文献[3]论 证了雷达的测距精度、测方位角精度和测俯仰角 精度均与载体姿态角大小有关,且姿态角越大时 探测误差越大;总的来说,飞艇的姿态变化对雷达 探测有不良影响,在其进行盘旋侦察时,雷达要求 飞艇姿态具有一定的稳定性。 由于飞艇自身的非线性环节、大惯性、数学模 型未知、时变参数和外界干扰等因素,飞艇的控制 较为困难。目前飞艇的控制研究主要包含如下方 法:模糊PID控制方法[4] 、鲁棒控制方法[5] 、H∞控制 方法[6] 和神经网络[7] 等。本文对存在模型不确定 性和风场等干扰的飞艇,设计鲁棒的飞艇盘旋控 制算法,外环采用自适应 PID 控制,姿态内环采用 线性自抗扰控制。控制器参数整定简单、便于工
程实现。经过仿真验证以及实际飞行试验,证明 所提出的盘旋控制方法的有效性,并给出了飞艇 实际盘旋飞行时的姿态变化范围,为搭载的雷达 进行运动补偿等提供了设计参考。
1 飞艇建模
对飞艇盘旋飞行进行分析后,对飞艇全系统 进行建模。主要包括建立含风场特性的飞艇通用 六自由度非线性模型;完成空中飞艇本体、动力、 伺服和传感器的全包线建模;对飞行全剖面下平 衡状态点进行快速配平与小扰动线性化。
1.1 飞艇的运动学方程
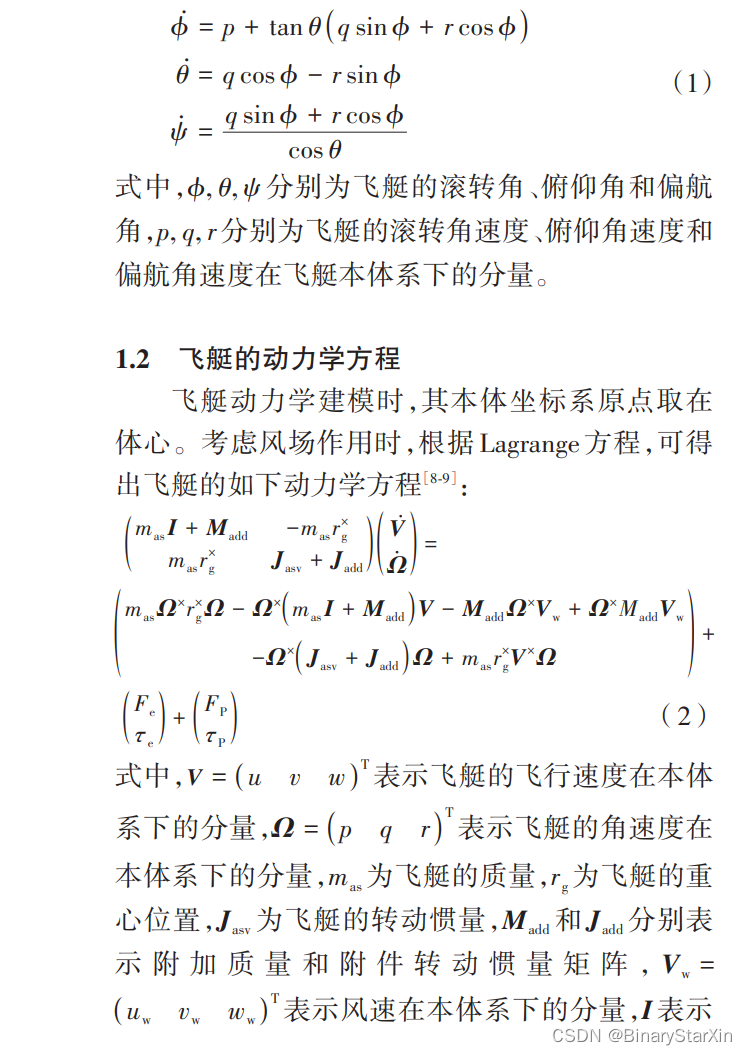
描述姿态的参数有多种形式,本文采用欧拉角 进行飞艇姿态描述,飞艇盘旋飞行时姿态运动学 方程为
三阶单位矩阵。FP和τP表示推力及其力矩在本体 系下的分量,Fe 和 τe 分别表示飞艇所受的其他力 和力矩在本体系下的分量,包括重力及其力矩、浮 力及其力矩和气动力及其力矩。
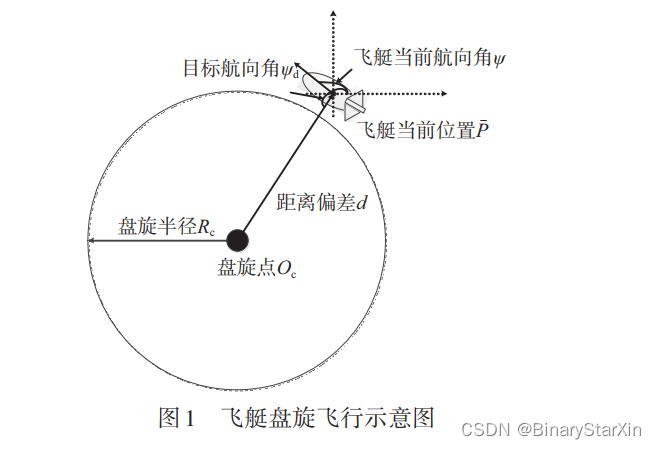
2 飞行盘旋控制器设计 2.1 控制目标 考虑上述飞艇的水平运动学与动力学模型, 可以将飞艇的航线位置跟踪及姿态控制问题描述 如下: 如图1所示,定义集合集:P - = { p1, p2,…, pn},其 中 pi = ( xi, yi) ∈ ℝ2 , i = 1, 2,…, n 为飞艇位置。对 于给定的pi, i = 1,…, n - 1,定义一个以Oc为圆心、 Rc 为半径的圆形目标航线,即满足条件 Bεi( pi) = { p ∈ ℝ } 2 :|Oc - pi | = Rc ,则在存在风速风向及飞 艇模型不确定性情况下,通过设计反馈控制律,最 终 控 制 飞 艇 位 置 能 够 始 终 满 足 上 述 的 条 件 Bεi( pi), i = 1,…, n - 1 并最终稳定在 Bεn ( pn ) 范围 内,同时满足飞艇俯仰角和滚转角姿态稳定。
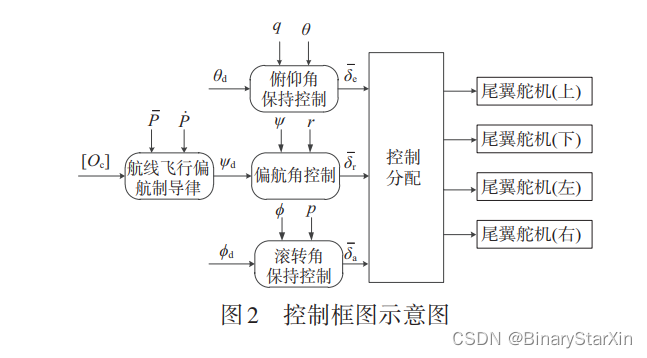
2.2 盘旋飞行控制器结构 飞艇盘旋飞行采用航线控制外回路(产生目 标偏航角)和姿态控制内回路(跟踪目标偏航角) 的双环控制结构:外回路是根据目标圆形航线、飞 艇当前位置、水平速度产生目标偏航角;内回路设 计姿态控制算法跟踪目标偏航角,同时对俯仰角和 滚转角进行保持,进行控制分配后,操纵飞艇舵面。 控制功能的实现方式如图2所示
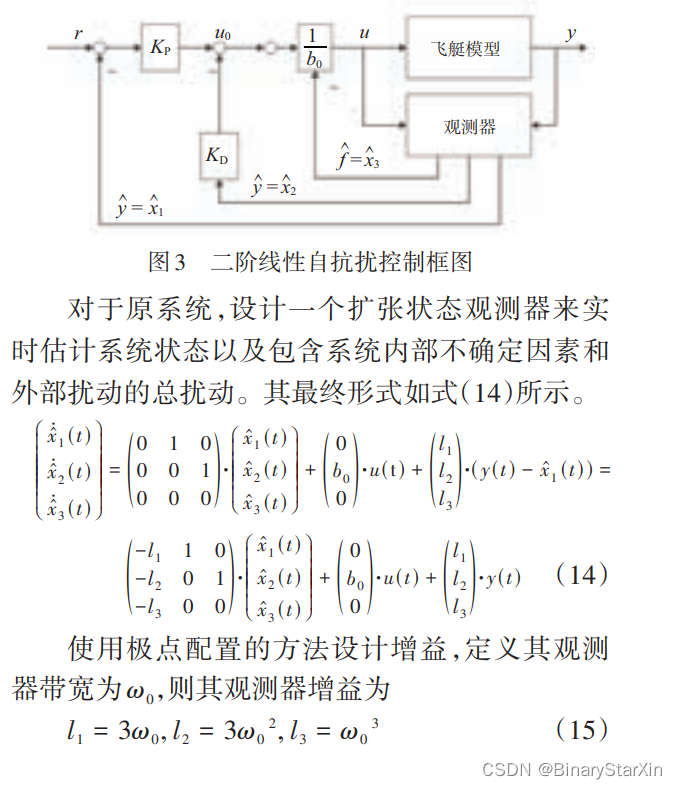
本文利用二阶线性自抗扰控制器完成目标偏 航角的跟踪,主要由三部分组成:跟踪微分器、扩 张状态观测器和线性状态误差反馈[10] 。偏航内回 路的姿态控制可以简化为二阶系统,其标准框如 图3所示。
2.5 仿真结果
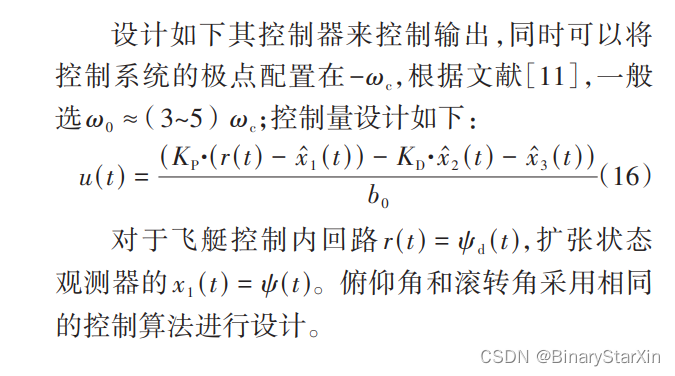
本节对双回路盘旋飞行控制算法进行仿真,以 验证其有效性。飞艇的目标航线为半径 500 m 的 圆形航线,飞艇的初始点坐标为(0,0),仿真固定时 长。仿真结果如图 4~6 所示,从仿真结果来看,所 设计的控制器能够迅速跟踪目标偏航角,并稳定 跟踪目标航线。
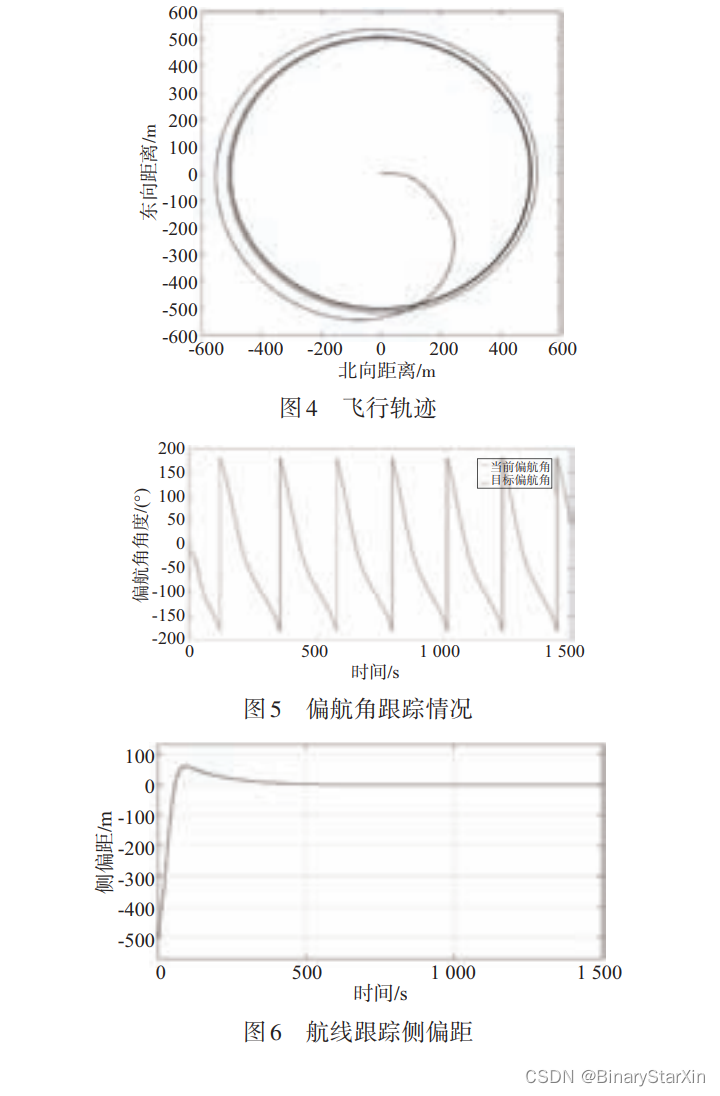
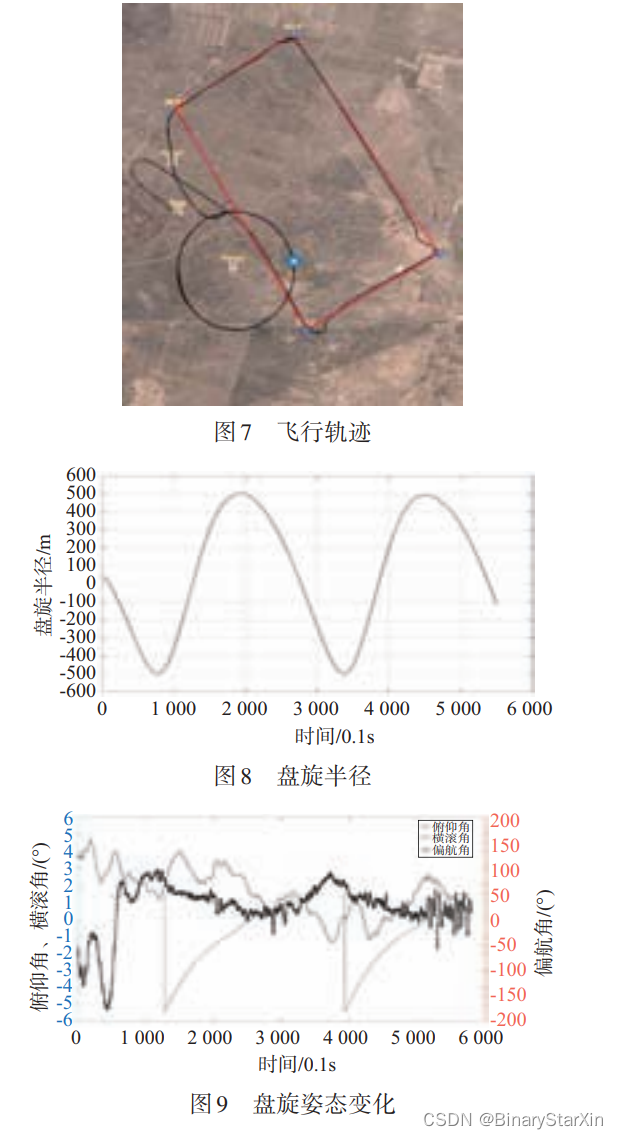
2.6 飞行验证 使用该控制算法的飞艇在我国西北地区进行 了长时间的飞行验证。某次航线飞行设计科目如 下:飞艇首先地面遥控起飞到离地 300 m 高度左 右,调整姿态后切换为自主控制飞行模式,飞艇沿 预定航线飞行1圈矩形航线,到达目标位置后执行 定点盘旋飞行(盘旋半径 500 m)。其试验飞行轨 迹如图 7 所示。飞行过程中飞行盘旋轨迹变化如 图 8 所示,盘旋半径误差小于 2.1 m。俯仰角和横 滚角连续变化,变换情况如图 9 所示,俯仰角变化 范围[-1.5°,1.5°],横滚角变化范围[-1°,2.5°],经 过评估实际飞行姿态变化情况满足所搭载雷达的 要求。
3 结束语
本文针对天线共形飞艇搭载雷达载荷进行盘 旋飞行的应用场景,使用自适应 PID+线性自抗扰 的双闭环控制算法,经过仿真验证和实际飞行试 验,飞艇能够按照目标盘旋航线飞行,验证了控制 算法的有效性,同时给出了实际盘旋飞行时的姿 态变化情况,为后续雷达设计提供参考。


这篇关于天线共形飞艇的盘旋飞行控制设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



