飞行专题

【专题】2024飞行汽车技术全景报告合集PDF分享(附原数据表)
原文链接: https://tecdat.cn/?p=37628 6月16日,小鹏汇天旅航者X2在北京大兴国际机场临空经济区完成首飞,这也是小鹏汇天的产品在京津冀地区进行的首次飞行。小鹏汇天方面还表示,公司准备量产,并计划今年四季度开启预售小鹏汇天分体式飞行汽车,探索分体式飞行汽车城际通勤。阅读原文,获取专题报告合集全文,解锁文末271份飞行汽车相关行业研究报告。 据悉,业内人士对飞行汽车行业

Unity接入飞行遥杆外设
readme 最近有朋友玩DSC,对于摇杆操控很感兴趣,然后想要接入外设来子级设计一套飞行逻辑。 设备测试 这里使用的设备是罗技X56摇杆套件、图马斯特摇杆套件 Unity使用插件 Rewired 场景搭建 创建空对象,挂载输入脚本:InputManager 接入硬件后,在右侧 Joy数组,会有遥杆名称,根据名称,展开以下的按键或者向量,即获得遥杆的操作值。 脚本测试 创建测试脚

5.12 飞行控制——PID参数优化
文章目录 5.12 飞行控制——PID参数优化5.12.1 XY轴角度系统P参数优化(1)软件设计(2)运行与调试 5.12.2 Z轴角度系统P参数优化5.12.3 Z轴位置系统P参数优化5.12.4 XY轴位置系统P参数优化 总目录:http://t.csdnimg.cn/YDe8m 5.12 飞行控制——PID参数优化 在“5.9.8”小节提到过,使用Matlab自

5.11 飞行控制——定点飞行
文章目录 5.11 飞行控制——定点飞行5.11.1 加入三轴位置的飞行硬件系统 FLY(s)5.11.2 数学模型——三轴位置系统(1)x、y轴位置系统的微分方程(2)z轴位置系统的微分方程(3)三轴位置系统的状态空间方程 5.11.2 A1软件设计5.11.3 A1运行与调试5.11.4 三轴位置串级PID控制器5.11.5 A2软件设计5.11.6 A2运行与调试5.11.7 期望误差

5.10 飞行控制——自稳飞行
文章目录 5.10 飞行控制——自稳飞行5.10.1 数学模型——三轴角度系统(1)三轴角度系统微分方程(2)状态空间方程的建立 5.10.2 A1软件设计5.10.3 A1运行与调试5.10.4 三轴角度串级PID控制器5.10.5 A2软件设计5.10.6 A2运行与调试 总目录:http://t.csdnimg.cn/YDe8m 5.10 飞行控制——自稳飞行

android13 隐藏状态栏里面的飞行模式 隐藏蓝牙 隐藏网络
总纲 android13 rom 开发总纲说明 目录 1.前言 2.问题分析 3.代码分析 4.代码修改 5.编译运行 6.彩蛋 1.前言 android13 隐藏状态栏里面的飞行模式,或者其他功能,如网络,蓝牙等等功能,隐藏下图中的一些图标。 2.问题分析 这里如果直接找这个布局的话,需要跟的逻辑比较多,因为是动态增加的。 所以我们改成这样入手,点击右侧

Cesium实现单个无人机飞行
通过一组坐标,实现平滑的无人机飞行效果 测试步骤: 1、手动填写坐标并记录坐标(可通过点击球面查看坐标信息) 2、点击初始化,载入相应的坐标信息 3、点击漫游,镜头会平滑演进 低配置云服务器,首次加载速度较慢,请耐心等候;演练页面可点击查看源码 预览页面:http://www.daelui.com/#/tigerlair/saas/preview/m026fjd5ub8e 演练页面
![基于cocos2dx的飞机大战学习[三]-为英雄添加飞行帧动作并控制飞机移动](https://img-blog.csdn.net/20150716212904474?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQv/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center)
基于cocos2dx的飞机大战学习[三]-为英雄添加飞行帧动作并控制飞机移动
第三节:为英雄添加飞行帧动作并控制飞机移动 一、为飞机添加飞行动画 为飞机添加飞行动画十分简单,只需要在FlyPlane::init()函数中创建一个动画对象,在里面添加两张英雄图并相互切换就可以了。 添加代码如下: //为英雄添加飞行动作,动作由动画组成,所以得到动作对象前,需要先得到动画对象//一、创建动画对象//1.1通过create得到动画对象auto ani

android 代码控制飞行模式开关 支持4.2以上 root
支持android 4.2以上系统 手机需要获取root权限 通过shell命令开关飞行模式 现在手机大都4.2以上了 代码可以选择性舍弃4.2一下的 private final static String COMMAND_AIRPLANE_ON = "settings put global airplane_mode_on 1 \n " +"am broadcast -a androi

飞行堡垒系列_键盘灯开关
飞行堡垒系列键盘灯可以通过键盘上的"Fn + 方向键"控制 演示机型品牌型号:飞行堡垒8 系统版本:Windows 11 飞行堡垒键盘灯可通过键盘上的"Fn+方向键"控制。 " Fn + 下方向键 "为减弱键盘灯光,多按几次键盘灯就可关闭。 " Fn + 上方向键 "可增强键盘灯光。除此此外,FN+F7/F8还可以调节屏幕的亮度。

今天遇到的3到智力面试题(给工人分金条,小鸟来回在2火车之间飞行的距离,精确称水问题)
智力题1:你让工人为你工作7天,给工人的回报是一根金条。金条平分成相连的7段,你必须在每天结束时给他们一段金条,如果只许你两次把金条弄断,你如何给你的工人付费? 答:把金条2次弄断的方式是第一次1,6分,,然后把剩余的6用2,4分,即弄断2次为1段、2段、4段 第一天给1段, 第二天让工人把1段归还给2段, 第三天给1段, 第四天归还1段和2段,给4段。 第五天给1段, 第六天给2
Pip换源秘籍:让你的Python包飞行起来!
在Python的包管理中,Pip是最重要的工具之一。它允许开发者从Python Package Index (PyPI)安装包,但有时由于网络问题或服务器负载过高,直接从PyPI安装包可能会非常慢。这时,更换Pip源到一个更快的镜像站点是一个常见的解决方案。本文将全面介绍Pip换源的基本概念、使用方法、主要作用以及注意事项。 一、Pip换源简介 1. Pip的起源 Pip是Pytho
手机网络卡顿,试试飞行模式
当你遇到某个网页刷新慢或者打不开,而通过切换飞行模式就能解决这个问题,可能的原因有以下几种: 1. 网络连接重置 切换飞行模式会导致你的手机断开当前的网络连接(包括Wi-Fi和移动数据),然后重新建立连接。这可以解决一些由网络不稳定或连接卡住引起的问题。例如: 原来的网络连接可能由于信号弱、干扰等原因导致速度慢,通过重新连接,手机可能会选择更好的基站或Wi-Fi接入点。DNS缓存问题:网络运

群体的按路径飞行研究
研究蝴蝶群体按路径飞行, 需求: 1 起始点一直生成 2所有生成的蝴蝶可以是粒子或者模型 3没有目标时随机飞 4有目标时随机飞的同时朝向目标点 5尽量贴近真实 目前成果: 还不完善,打算先发出来 资源地址,免费提供下载 https://download.csdn.net/download/u011407338/12246597
中国飞行器设计创新大赛多旋翼无人机任务飞行
源码:后续补充 1、启动launch文件 roslaunch robot_bringup mission.launch <launch> <!--启动mavros节点 --><include file="$(find mavros)/launch/px4.launch" /><!--启动USB摄像头节点 --><include file="$(find realsense2_ca


低空经济+飞行汽车:eVTOL技术详解
低空经济是以各种有人驾驶和无人驾驶航空器的各类低空飞行活动为牵引,辐射带动相关领域融合发展的综合性经济形态。它广泛体现于第一、第二、第三产业之中,在促进经济发展、加强社会保障、服务国防事业等方面发挥着日益重要的作用。 飞行汽车,特别是eVTOL(电动垂直起降飞行器)技术,是低空经济中备受关注的一部分。eVTOL是一种电力驱动、垂直起降的飞行器,具有飞行更远、安全性更高、能耗更低且成本更低

无人机+飞行汽车:低空经济新引擎,有望爆发式增长
无人机和飞行汽车作为低空经济的新引擎,正在引领一场全新的交通革命。随着技术的不断进步和政策的支持,低空经济有望成为未来经济发展的重要领域,实现爆发式增长。 首先,无人机和飞行汽车具有独特的优势和应用场景。无人机可以在空中进行各种复杂的任务,如送货、农业监测、搜寻救援、环境监测等,大大提高了效率和安全性。而飞行汽车则可以为人们提供更加便捷、高效的出行方式,缓解地面交通拥堵问题,实现城市空中交通的梦

240 基于matlab的飞行轨迹仿真程序
基于matlab的飞行轨迹仿真程序,多种不同的飞行轨迹,输出经度、纬度、高度三维轨迹,三个方向的飞行速度。程序已调通,可直接运行。 240 飞行轨迹仿真 三维轨迹 飞行速度 - 小红书 (xiaohongshu.com)

日本宇宙航空研究“Int-Ball2”自由飞行相机机器人采用的Epson IMU
IMU有助于飞行的稳定控制和电池充电的自动对接- 精工爱普生公司(TSE:6724,“Epson”)很高兴地宣布,日本宇宙航空研究开发机构(JAXA)选择了爱普生M-G370系列的惯性测量单元(IMU),用于部署在国际空间站(ISS)的日本实验舱“Kibo”上的移动相机机器人。日本宇宙航空研究开发机构开发的“Int-Ball2(内部球相机2)”自由飞行相机机器人自2023年6月以来一直在Ki

多旋翼无人机的飞行特点
🚁多旋翼无人机,这个科技界的宠儿,飞翔在天际的精灵,你有没有被它的魅力所吸引呢? 🤩它不同于传统的固定翼飞机,凭借其独特的设计,在空中翩翩起舞,简直是一场视觉盛宴! ✨想象一下,它轻盈地穿梭在城市的高楼大厦之间,捕捉那些平时难以触及的美景;或是深入山林,记录下大自然的鬼斧神工。这种灵活多变的飞行方式,不禁让人感叹科技的魅力无穷! 🤔不过,多旋翼无人机的飞行特点究竟有哪些呢?它又是如何在

飞行机器人专栏(十四)-- Kinect DK 人体骨骼点运动提取方法
系列文章目录 Ubuntu 18.04/20.04 CV环境配置(下)--手势识别TRTpose+Kinect DK人体骨骼识别_ubuntu kinect骨骼测试-CSDN博客文章浏览阅读1.3k次。trt_pose_ros+ kinect实现手势识别和人体骨骼识别,用于机器人运动控制参考_ubuntu kinect骨骼测试https://haowang.blog.csdn.net/artic
NASA数据集——亚洲夏季季候风化学和气候WB-57 飞机飞行轨迹上的气象、化学和气溶胶模型数据
ACCLIP WB-57 Aircraft Model Data 简介 ACCLIP_Model_WB57_Data 包含亚洲夏季季风化学和气候影响项目(ACCLIP)期间 WB-57 飞机飞行轨迹上的气象、化学和气溶胶模型数据。该产品的数据收集工作已经完成。 亚洲夏季季候风化学和气候影响项目(ACCLIP)是一项国际性、多组织的亚轨道活动,旨在研究 2022 年 7 月 15 日至 202
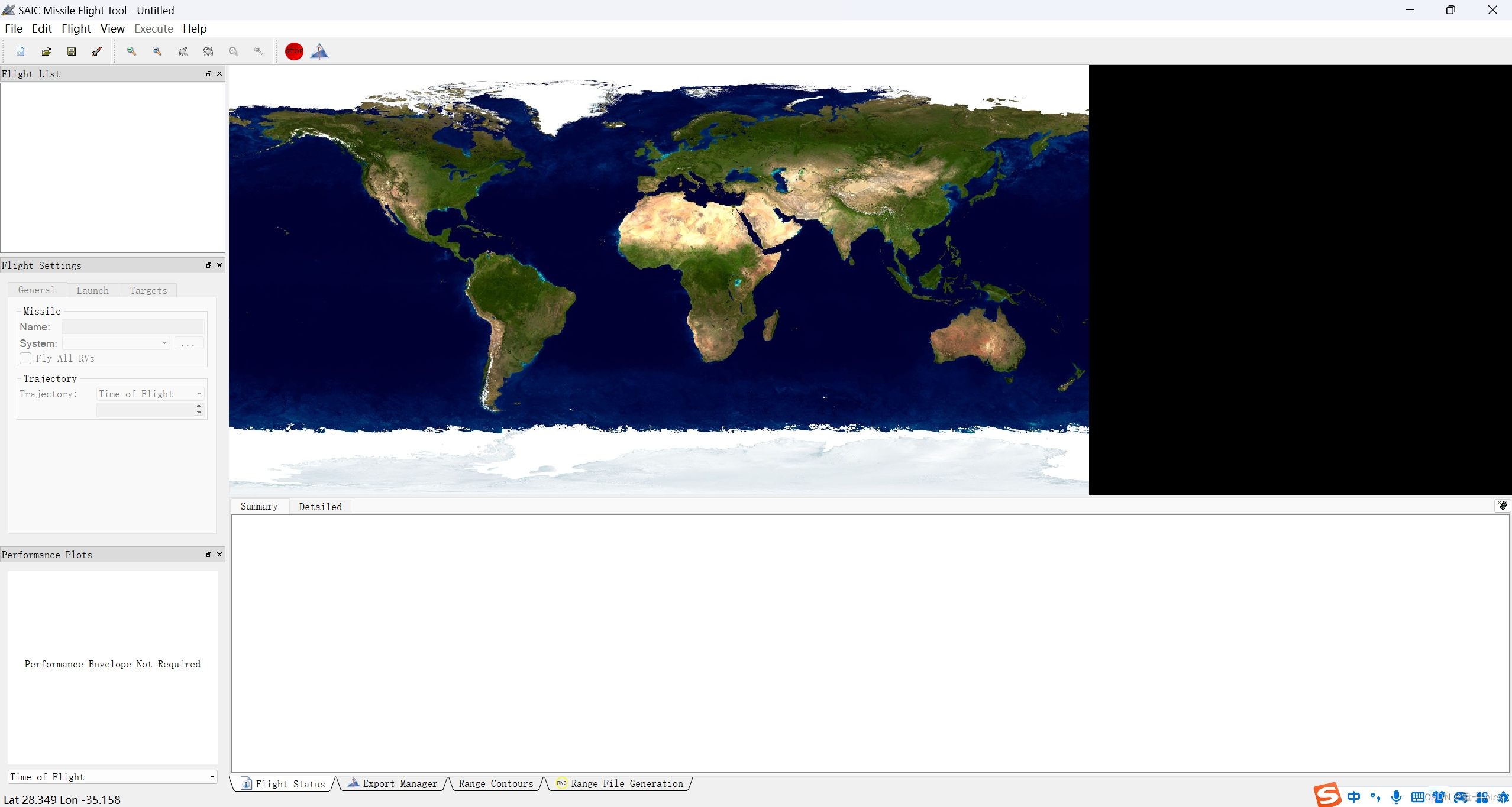
【STK】手把手教你利用STK进行导弹和反导仿真03 - STK/MMT模块02 导弹飞行工具用户界面
MFT导弹飞行工具是MMT模块中的核心部分,它提供多级导弹飞行轨迹,易于在STK中分析和可视化。对于一个特定的导弹模型,可通过定义发射点和打击点及轨迹类型,生成飞行轨迹和飞行数据。 MFT提供代表多种导弹类型和性能参数的导弹数据库。可导出轨迹和相关联的对象飞行数据,并直接用到STK场景的地图和可视化。 MFT用户界面设计将所有任务、选项和MFT参数直接放下窗口前,用于快速浏览和简化性能。用户界面
基于双向长短期神经网络LSTM的飞行轨迹预测,基于GRU神经网络的飞行轨迹预测
目录 背影 摘要 LSTM的基本定义 LSTM实现的步骤 BILSTM神经网络 基于双向长短期神经网络LSTM的飞行轨迹预测,基于GRU神经网络的飞行轨迹预测 完整代码: 基于双向长短期神经网络LSTM的飞行轨迹预测,基于GRU神经网络的飞行轨迹预测资源-CSDN文库 https://download.csdn.net/download/abc991835105/89100162 效果图 结果分析