本文主要是介绍睿尔曼超轻量仿人机械臂--AGV复合机器人第一部分,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1. 项目概述
2. 复合机器人方案设计
需实现功能及场景:
移动底盘要求:
机械臂要求:
3. 硬件介绍及组成
协作机械臂
移动底盘
1. 项目概述
AGV复合机器人是一种具备移动机器人和协作机械臂二者功能的新型机器人,复合机器人可配备多种传感器,如激光雷达、视觉传感器、磁导航传感器、超声测距传感器、碰撞传感器、红外传感器、IMU传感器等。根据移动底盘的不同,可实现室内外不同场景下的巡检、采摘、仓储转运等任务。
本文以睿尔曼超轻量仿人机械臂+云迹全向底盘实现集成开发一台AGV复合机器人,并将集成过程作记录。
2. 复合机器人方案设计
需实现功能及场景:
| 工作环境要求: | 室内、家庭场景 |
| 工作高度要求: | 1000mm及以下 |
| 机器人灵活性要求: | 可通过宽度1m的走廊 |
移动底盘要求:
| 尺寸要求: | 适用于家庭环境及室内环境 |
| 负载要求: | 10kg及以上 |
| 需完成任务: | 室内建图、导航、避障 |
机械臂要求:
| 形态要求: | 协作机械臂,适用于家庭及室内环境 |
| 重量要求: | 10kg以下 |
| 负载要求: | 5kg |
| 需完成任务: | 桌面整理、物品搬运等 |
3. 硬件介绍及组成
根据复合机器人方案设计的要求,对移动底盘、机械臂、末端执行器进行选型。
协作机械臂
根据场景要求,选择睿尔曼超轻量仿人六轴机械臂作为复合机械臂的操作机械臂,并且在机械臂末端集成执行器。
主要参数如下:
| 有效负载 | 5kg |
| 本体重量 | 7.2kg |
| 重复定位精度 | ±0.05mm |
| 工作半径 | 610mm |
| 供电电压 | DC24V |
| 防护等级 | IP54(机械臂本体) |
| 材质 | 铝合金 |
| 控制器 | 集成 |
| 通讯方式 | WIFI/网口/蓝牙/USB串口/RS485 |
| 控制方式 | 拖拽示教/示教器/API/JSON |
移动底盘
根据工作场景要求,选择“云迹水滴2”作为移动底盘,实现建图、导航、避障功能,同时底盘具备自主回充功能。
主要参数如下:
| 外形尺寸 | 直径 505mmx 高 280(mm) |
| 自重 | 45kg |
| 载重 | 额定45kg,最大载重80kg |
| 电源 | 18650电池组,25.2V 20Ah |
| 传感器 | 超声测距、IMU六轴、碰撞检测、激光雷达 |
| 运行速度 | 默认1m/s,最大1.2m/s |
机器人主要部件
| 组件名称 | 数量 |
| 双轮差速底盘 | 1台 |
| 睿尔曼超轻仿人机械臂 | 1条 |
| 末端执行器 | 1个 |
| JETSON NX主控 | 1个 |
| 小型交换机 | 1个 |
复合机器人实物示意图

复合机器人硬件连接示意图
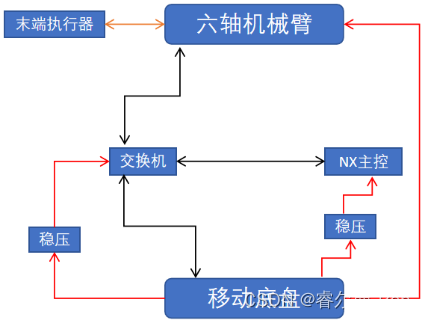
接线说明:机械臂、移动底盘、NX主控通过网线连接至小型交换机,用于各模块之间通信;NX主控、交换机的供电从移动底盘分别通过1个稳压模块完成;末端执行器安装并连接至机械臂末端,与机械臂进行通信,且机械臂供电给末端执行器;
AGV复合机器人的硬件组成及连接到此结束,下期文章发布AGV复合机器人的软件控制。
这篇关于睿尔曼超轻量仿人机械臂--AGV复合机器人第一部分的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!