睿尔曼超专题
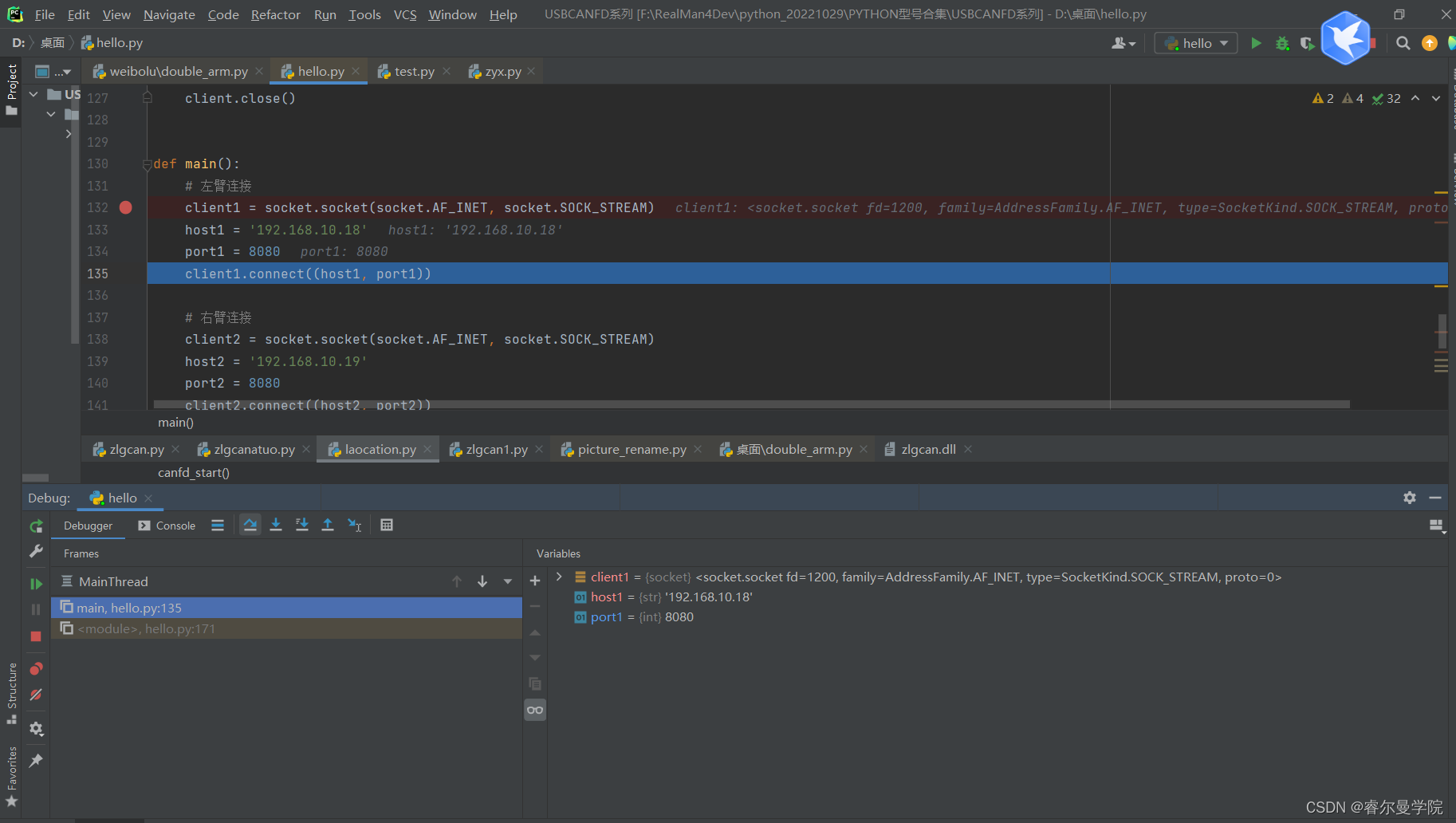
睿尔曼超轻量仿人机械臂-- Python之debug
Pycharm之debug PyCharm 是一款功能强大的 Python 集成开发环境 (IDE),它提供了许多调试工具,可以帮助您快速找到并修复代码中的错误。 PyCharm 的调试工具包括: * **断点:** 断点允许您在代码的特定行暂停执行,以便您可以检查变量的值和程序的状态。 * **单步执行:** 单步执行允许您逐行执行代码,以便您可以看到代码是如何执行的。
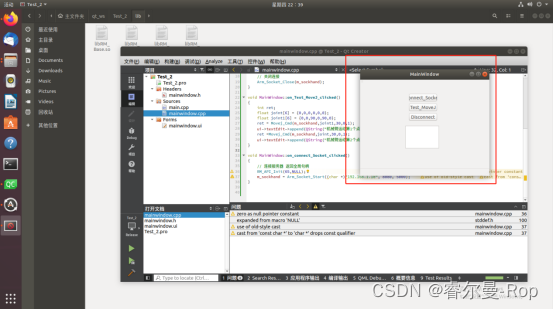
睿尔曼超轻量仿人机械臂--二次开发之C++ API接口使用
目录 一、API文件简介 二、C++语言开发环境说明及接口使用 Win10系统下使用 1. 开发环境 2. 项目创建&加载C++SDK 创建C++项目 加载SDK文件 3. API常用接口使用 Linux系统下使用 1. 开发环境说明 2. 项目创建&加载C++SDK 3. API常用接口使用 一、API文件简介 睿尔曼系列机械臂提供多种高
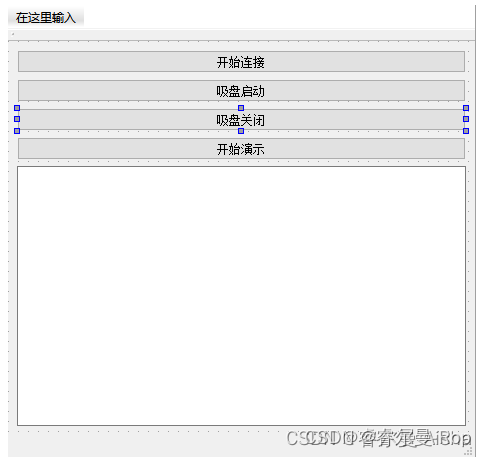
睿尔曼超轻量仿人机械臂--集成应用真空吸盘
目录 二、真空吸盘的集成使用 真空吸盘结构安装 真空吸盘控制 JSON协议控制 高级语言SDK开发 睿尔曼系列机械臂有着丰富的外设接口,可十分便捷的与其他执行器相结合。如:二指夹爪、五指灵巧手、真空吸盘等。 本文主要介绍真空吸盘与机械臂集成的使用,后续会陆续将其他设置的使用发出来。 资料链接:https://pan.baidu.com/s/1B_NBbbry_N-xUK8
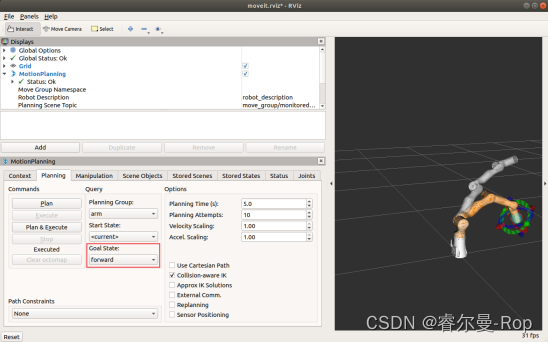
睿尔曼超轻量仿人机械臂-ROS第一篇 启动机械臂的Moveit
本文主要讲述了睿尔曼六轴机械臂在ROS中的功能包配置,及如何根据文件启动Moveit做仿真。文中涉及的机械臂ROS包已存放网盘,链接如下: 链接:https://pan.baidu.com/s/1LC0SsoRJ-HOHcFXkN0I1cQ?pwd=xk8f 提取码:xk8f 目录 1. 机械臂ROS包介绍 2. 使用前环境准备 3. 源码的安装编译 4.在rviz中显示机械臂模型
睿尔曼超轻量仿人机械臂--Linux系统基础
目录 1. 系统说明 1.1 简介 1.2 Linux各版本示意 1.3 Linux系统目录结构说明 2. 系统安装 2.1 虚拟机中安装Ubuntu系统 2.1.1 VMware软件及Ubuntu镜像准备 2.1.2 VMware软件安装 2.1.3 虚拟机中Ubuntu系统的安装 3. 常用Linux命令说明 3.1 系统基础命令说明 3.1.1 基础文件和目录管理
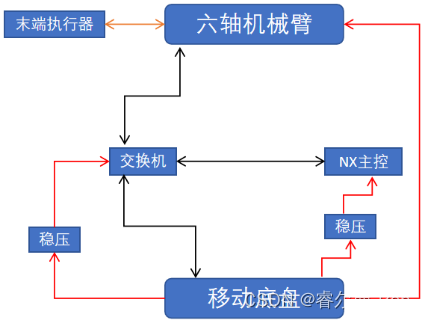
睿尔曼超轻量仿人机械臂--AGV复合机器人第一部分
目录 1. 项目概述 2. 复合机器人方案设计 需实现功能及场景: 移动底盘要求: 机械臂要求: 3. 硬件介绍及组成 协作机械臂 移动底盘 1. 项目概述 AGV复合机器人是一种具备移动机器人和协作机械臂二者功能的新型机器人,复合机器人可配备多种传感器,如激光雷达、视觉传感器、磁导航传感器、超声测距传感器、碰撞传感器、红外传感器、IMU传感器等。根据移