本文主要是介绍VMMECH003_Modal Analysis of Annular Plate,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ANSYS Workbench 环形板模态分析
案例分析:
如下图所示,一个由三个环形板组成的装配体环形板,其中孔所在的圆柱面设置为圆柱面支撑(径向、切向和轴向均固定)。孔所在的圆柱面的网格尺寸大小为0.5 in。
求出系统固有频率的前六个模态。

| 材料属性 | 几何特征 | 应用载荷 |
|---|---|---|
| E= 2.9008e7 psi v = 0.3 ρ = 0.28383 Ibm/in3 | 内板内径 = 20 in 中间板内径 = 28 in 外板内径 = 34 in 外板外径 = 40 in 所有板厚度 = 1 in |
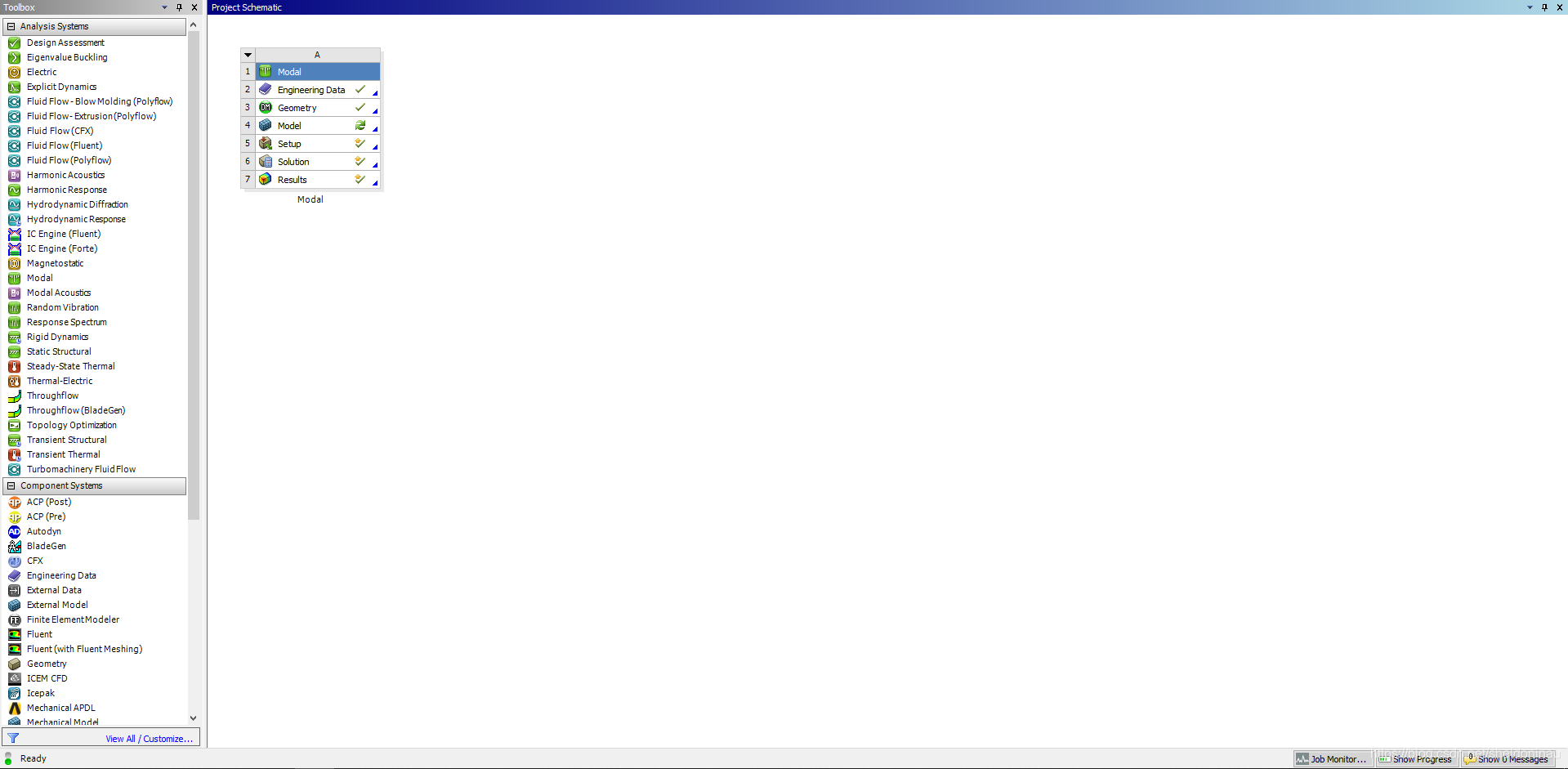
1. 选择分析模块
此案例选择Modal模块进行分析。从Analysis System中拖拽Modal模块到Project Schematic中即可。
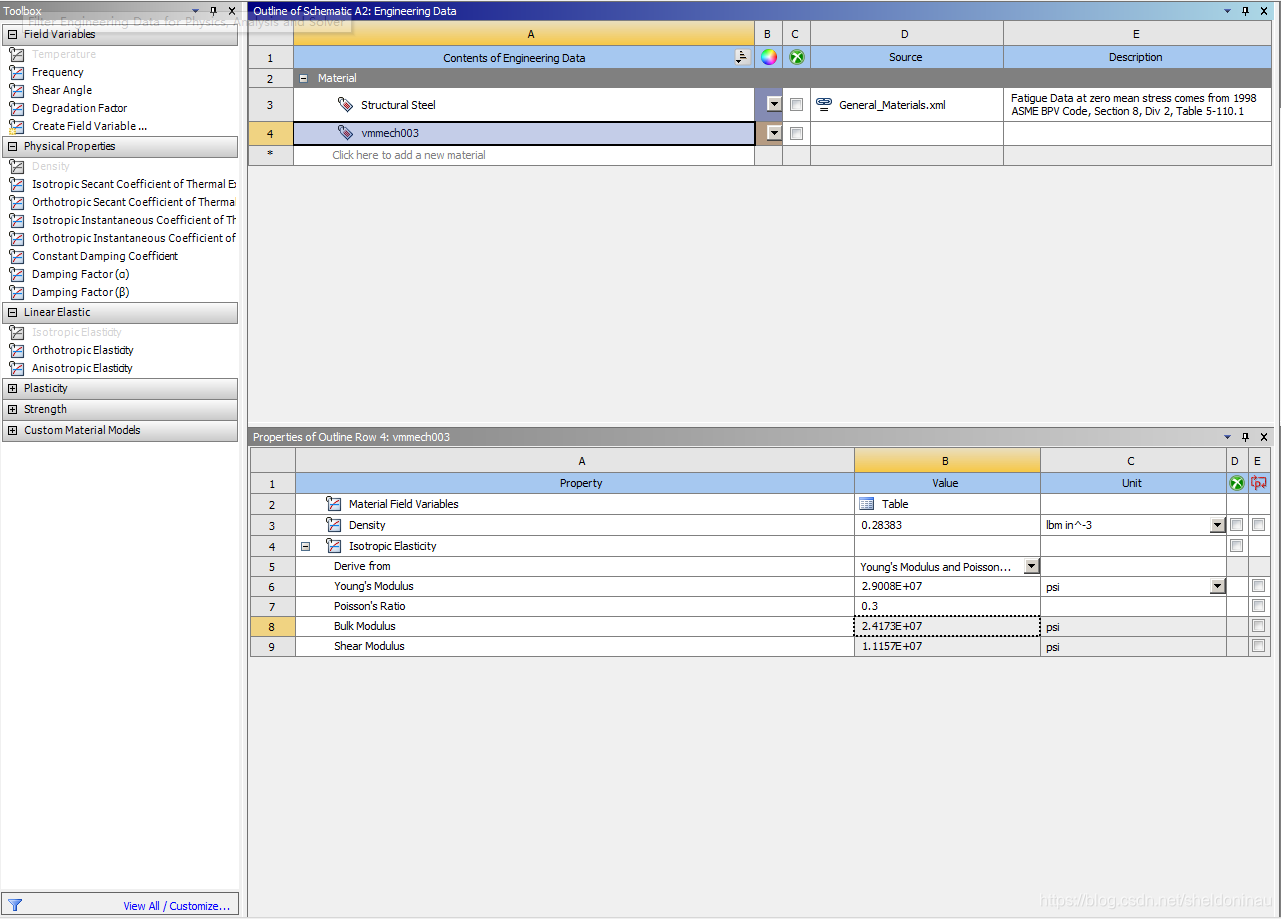
2. 定义材料属性
所用材料属性在材料库中无法找到,因此使用自定义属性。
— 右键Engineer Data并选择Edit/双击Engineer Data
— 新建材料并定义材料名称
— 从Toolbox中选中所需要的材料属性并双击添加
— 底部窗格中键入对应数值
3. 建立几何数模
根据已知几何特征属性创建几何图形如下图所示。
右键Geometry并选择Edit Geometry in DesignModeler…
hint:可以通过添加冻结/Add Frozen来分别创建环形板

4. 生成网格
— 双击Model/右键Model选择Edit
— 右键Mesh,添加Sizing,并选中孔所在圆柱面,在详细信息视图中设置单元格尺寸大小为0.5 in。
注:在生成网格之前,可以先将材料属性赋予几何体。展开Geometry选中几何实体,在相关详细信息视图中Material项的关联菜单中选出之前自定义的材料。

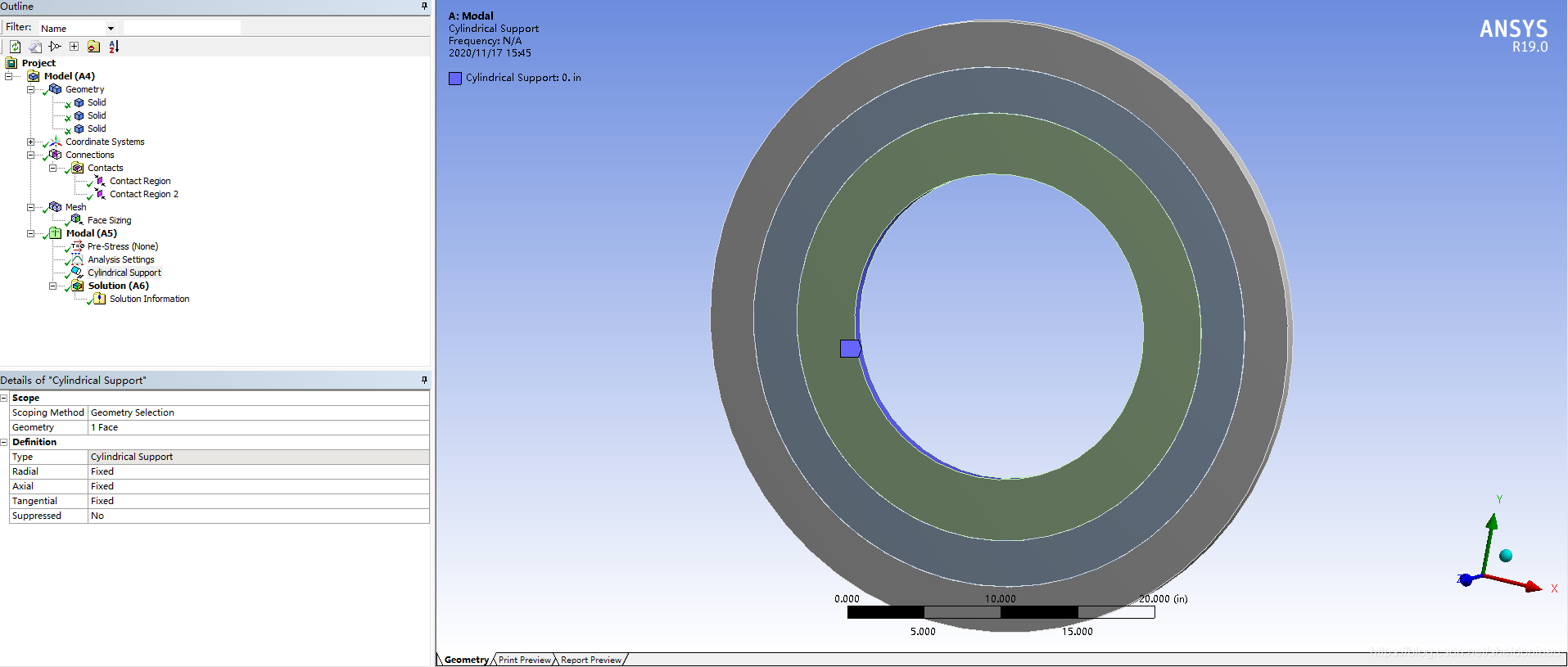
5. 添加边界条件和载荷
如下图所示,孔所在圆柱面为圆柱面支撑,其他为自由或不作约束。
边界条件与载荷:Modal右键,插入Cylindrical Support,并设置如下
6. 求解设置
Modal模块中默认结果输出为系统固有频率的前六个模态,因而在此不做其他设置。
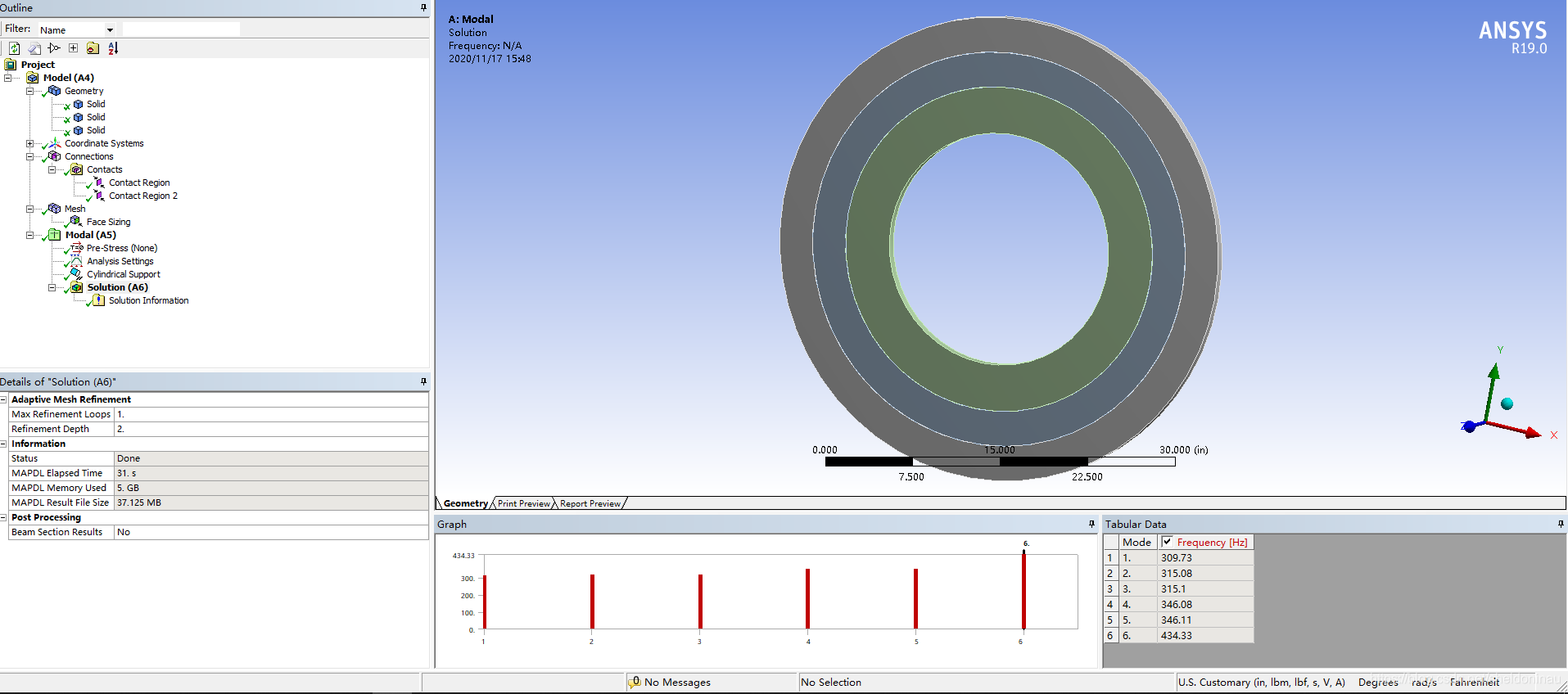
7. 结果
下图为分析结果。右下角表格数据窗口查看结果。
ANSYS Mechanical结果比较
| Results | Target | Mechanical | Error(%) |
|---|---|---|---|
| 一阶频率模态 | 310.911 | 309.73 | -0.38 |
| 二阶频率模态 | 318.086 | 315.08 | -0.94 |
| 三阶频率模态 | 318.086 | 315.10 | -0.94 |
| 四阶频率模态 | 351.569 | 346.08 | -1.56 |
| 五阶频率模态 | 351.569 | 346.11 | -1.56 |
| 六阶模态频率 | 442.451 | 434.33 | -1.84 |
注:上述Mechanical结果对于不同计算机可能会有些许差别
Reference:
R. J. Blevins, Formula for Natural Frequency and Mode Shape, Van Nostrand Reinhold Company Inc., 1979, Table 11-2, Case 4, pg. 247
ANSYS Help 19.0
这篇关于VMMECH003_Modal Analysis of Annular Plate的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!