本文主要是介绍hokuyo网口雷达UST-10LX或UST-20LX两种连接方式,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这两款hokuyo都是网口连接,有两个连接方式:
1.雷达网口与笔记本直接连接;
2.雷达网口连在路由器上,笔记本再连路由wifi。
记录一下两种连接(我的10LX的ip是192.168.1.10,20LX的ip是192.168.0.10)
方法一:雷达网线直接与开发板或笔记本连接
笔记本插入雷达网口后,先配置网络连接,如果ubuntu是图形化界面的话,这里的配置也可以分为两种。
1.文件修改,如参考:https://www.ncnynl.com/archives/201703/1431.html,通过 /etc/network/interfaces,修改静态ip。
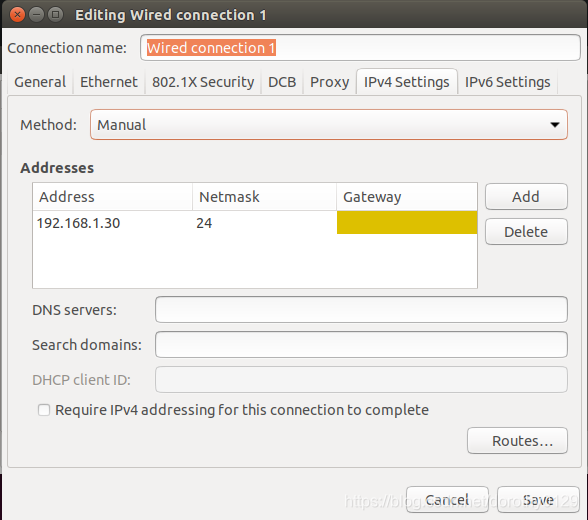
2.图像化界面修改,通过network connections,即右上角网络连接图标 ---edit connections---(在Ethernet下)选择add---ipv4 settings ---method选择 manual;address选择add,如下图----保存---然后手动选择这个添加的网络。
(ipv4里先选择手动,再修改地址设置与雷达同一网段)
(如果新加的这个一直无法连接成功,那就将之前添加的有线连接全部删除,然后再次插入雷达网口,会出现一个新的连接,直接修改这个连接)
然后ping 192.168.1.10一下雷达,看能否ping通
ip如果确保和雷达在一个网段下,肯定没问题。可以ifconfig看一下自己的ip地址。
能ping通就
roscore
rosrun urg_node urg_node _ip_address:=192.168.1.10
如果有streaming data就开启成功
方法二:雷达连接路由器
将雷达的网线插在路由器的lan口,然后笔记本或开发板通过wifi连接此路由器,然后修改这个无线连接的ip了,要与雷达一个网段。同理。
总结:
这两种连接对于接收雷达数据的终端(笔记本或开发板)来说,一种方式是有线连接,另一种是无线连接。
有线连接有一个好处。在ros中多台设备可以在同一个无线地址中通信。由于hokuyo雷达有一个固定ip,为了获取雷达数据必须要与hokuyo修改至同一个网段下。如果选择有线连接,那么只用修改有线连接的ip,那么无线连接的ip就没有限制了,可以与别的设备在同一个无线地址中通信了(此时其他设备即使没有与雷达一个网段也能获取雷达数据了)。
这篇关于hokuyo网口雷达UST-10LX或UST-20LX两种连接方式的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






