ust专题
结合hokuyo的UST-10LX激光雷达在turtlebot上建图
本人手上所用的激光雷达是hokuyo的UST-10LX型号,接口是网口类,要将其放在turtlebot上进行SLAM建图,修改的文件和USB接口的雷达一样,但是内容上有细微差异。我也是找了好些博客综合而来,有错误的地方还请大神们多多指教。 首先,得先弄明白几点情况: 1.在ROS上安装包有两种方式,一种是通过apt-get insatll安装Debian文件,一种是源文件安装。我学习ROS不深

Hokuyo,UST-10LX,网口类激光雷达使用
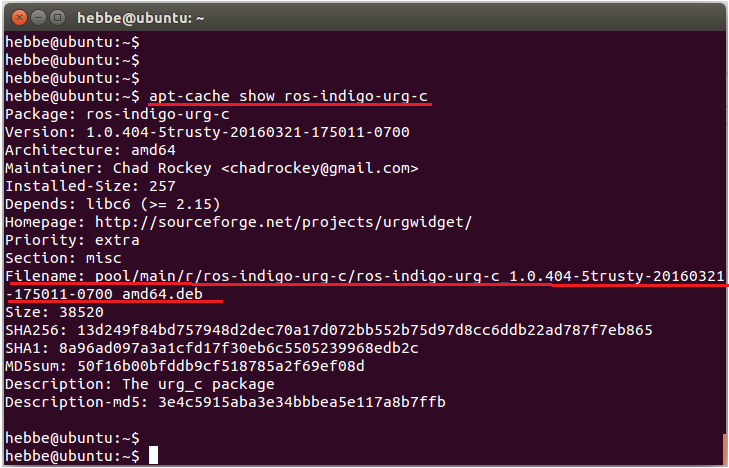
Hokuyo激光雷达UST-10LX: 如果使用的是USB接口的激光雷达,直接看ROS-wiki的教程就可以了: http://wiki.ros.org/hokuyo_node/Tutorials/UsingTheHokuyoNode 1.首先下载相关节点包,UST-10LX采用的接口是以太网接口,所以需要下载urg_node的包, $ sudo apt-get install ros-i

ust能力养成系列之(35):内存管理:以特性复制类型
前言 简言之,Copy 和Clone 特性提现了类型在代码中的复制方式。 Copy Copy特性通常是为栈上类型而实现的(The Copy trait is usually implemented for types that can be completely represented on the stack),也就是说,该特性自身没有任何部分存在于堆(heap)上。那是因为,如果在
hokuyo网口雷达UST-10LX或UST-20LX两种连接方式
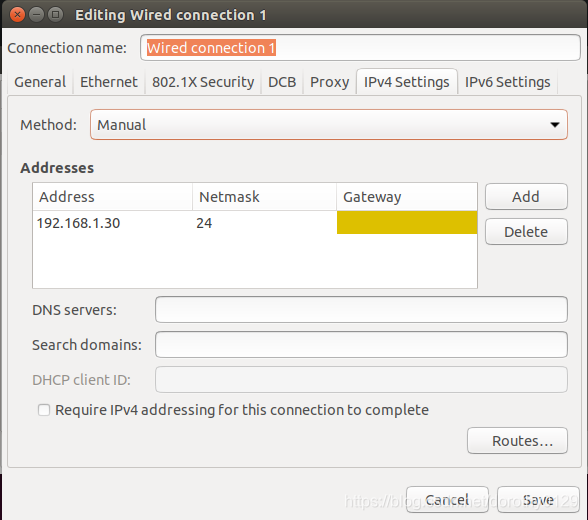
这两款hokuyo都是网口连接,有两个连接方式: 1.雷达网口与笔记本直接连接; 2.雷达网口连在路由器上,笔记本再连路由wifi。 记录一下两种连接(我的10LX的ip是192.168.1.10,20LX的ip是192.168.0.10) 方法一:雷达网线直接与开发板或笔记本连接 笔记本插入雷达网口后,先配置网络连接,如果ubuntu是图形化界面的话,这里的配置也可以分为两
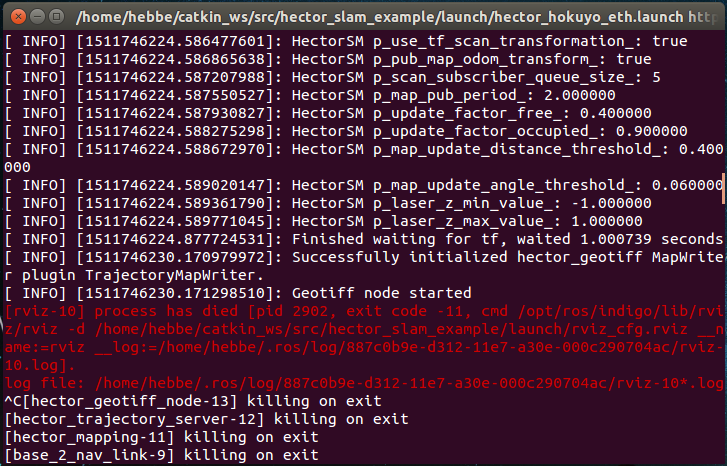
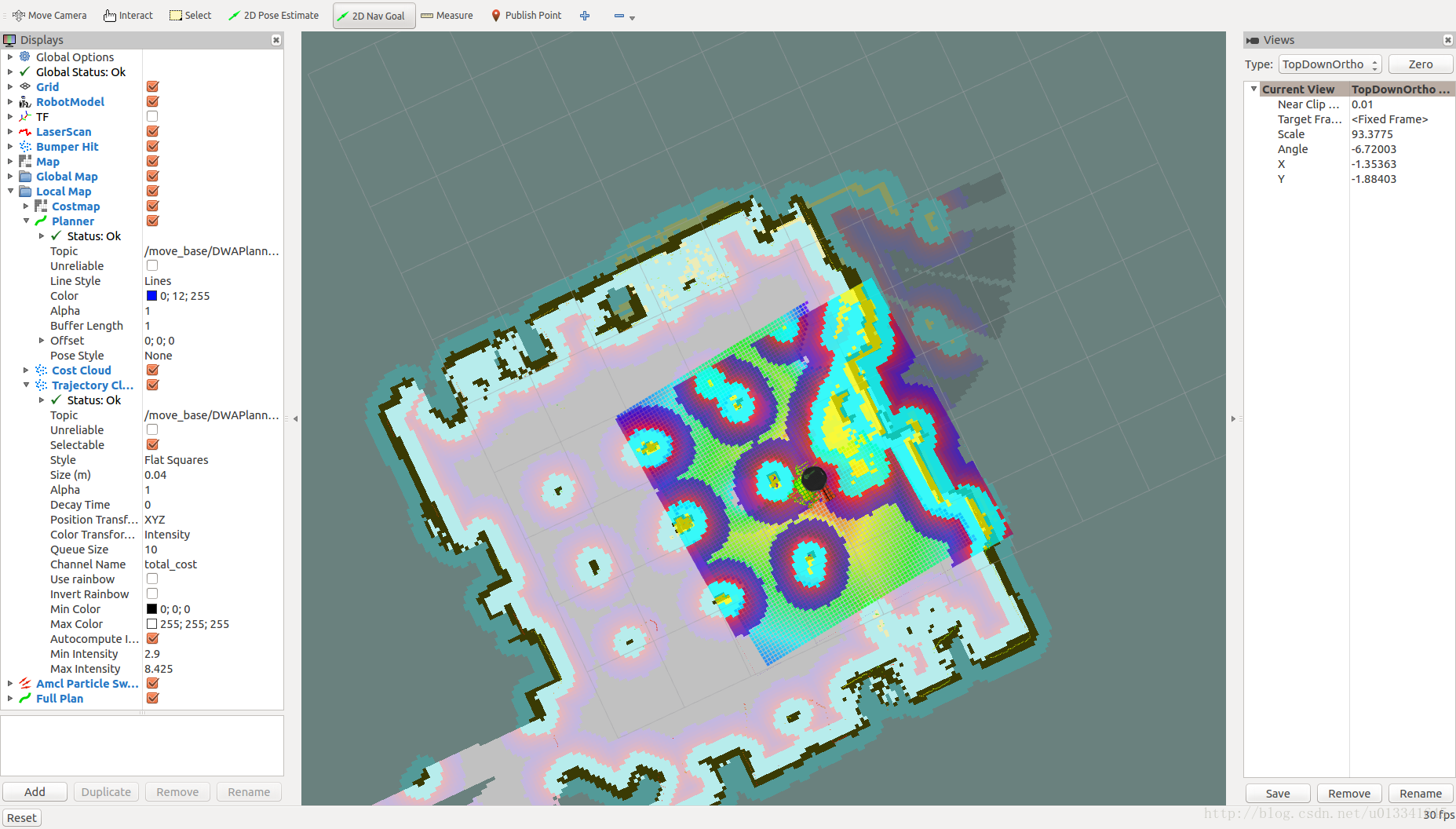
UST-10LX使用hector_slam构建地图
简述: 本文讲述的是hokuyo UST-10LX在Ubuntu 14.04.5 ROS Indigo下进行实验,然后通过hector_slam构建地图。 slam(Simultaneous Localization andMapping,同步定位与建图)。 ros 中常用的2d slam 算法主要有 gmapping和hector_slam ,其中 hector_slam是个性
在ROS中使用Hokuyo激光雷达UST-10LX和UST-30LX
简述: 本文讲述的是hokuyo UST-10LX 和 UST-30LX 在Ubuntu14.04.5 ROS Indigo下进行实验。 运行环境: 系统:Ubuntu14.04.5 amd64(下载) ROS:ROS Indigo Igloo UST-10LX 或UST-30LX IP地址:192.168.211.221 其中,ROS 安装及配置

使用ust-10lx激光雷达通过hector_slam创建实验室地图
转载说明,特别鸣谢: <1>Hokuyo URG-04LX用hector_slam创建地图(无IMU) http://blog.csdn.net/z15f34/article/details/53237845 <2>妹子教你在ROS中使用Hokuyo激光雷达UST-10LX和UST-30LX http://rosclub.cn/post-515.ht