本文主要是介绍【Unity3D赛车游戏】【四】在Unity中添加阿克曼转向,下压力,质心会让汽车更稳定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

👨💻个人主页:@元宇宙-秩沅
👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅!
👨💻 本文由 秩沅 原创
👨💻 收录于专栏:Unity游戏demo
⭐🅰️Unity3D赛车游戏⭐
文章目录
- ⭐🅰️Unity3D赛车游戏⭐
- ⭐前言⭐
- 🎶(==A==)车辆优化——阿克曼转向添加
- 😶🌫️认识阿克曼转向
- 😶🌫️区别:
- 😶🌫️关键代码
- 😶🌫️完整代码
- 🎶(==B==)车辆优化——车身持续稳定的优化
- 😶🌫️速度属性实时转换
- 😶🌫️为车子添加下压力
- 😶🌫️质心的添加centerMess
- 😶🌫️轮胎的平滑度的显示
- 🎶(==C==)脚本记录
- CarMoveContorl
- CameraFllow
- InputMana
- ⭐🅰️⭐
⭐前言⭐
–
😶🌫️版本: Unity2021
😶🌫️适合人群:Unity初学者
😶🌫️学习目标:3D赛车游戏的基础制作
😶🌫️技能掌握:
🎶(A)车辆优化——阿克曼转向添加
😶🌫️认识阿克曼转向
引用:阿克曼转向是一种现代汽车的转向方式,也是移动机器人的一种运动模式,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎
原理图:
_____________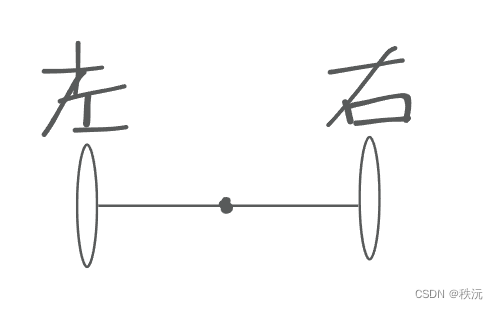
简单理解:一个杆子把左轮和右轮连接起来一起转。
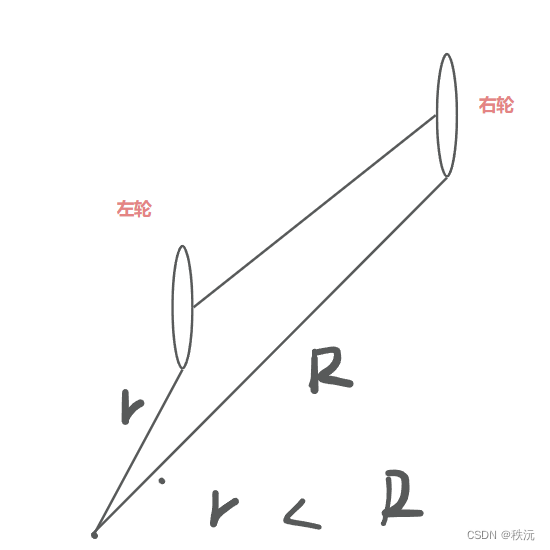
左轮的旋转的半径小于右轮
优点:大大减小了车轮转向需要的空间,转向更加稳定
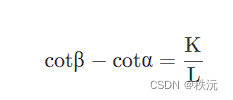
- 阿克曼公式:
β为汽车前外轮转角,α为汽车前内轮转角,K为两主销中心距,L为轴距。
😶🌫️区别:
-
未添加阿克曼转向之前的原理:
通过控制轮子的最大转向范围来转向

-
添加之后
更稳定,机动性更强

😶🌫️关键代码
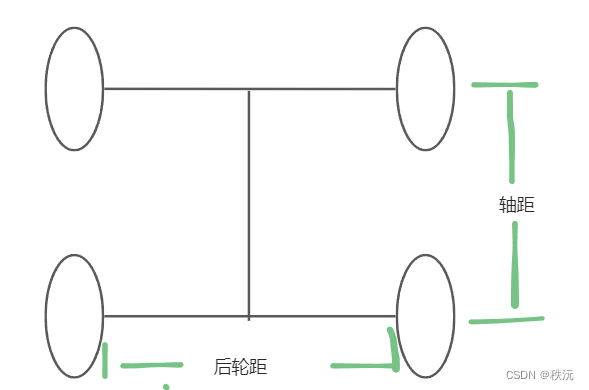
- 后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小
if (horizontal > 0 ) {
//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;} else if (horizontal < 0 ) { wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * horizontal;} else {wheels[0].steerAngle =0;wheels[1].steerAngle =0;}
😶🌫️完整代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 车轮的运动
//___________创建者:_______秩沅________
//_____________________________________
//-------------------------------------//驱动模式的选择
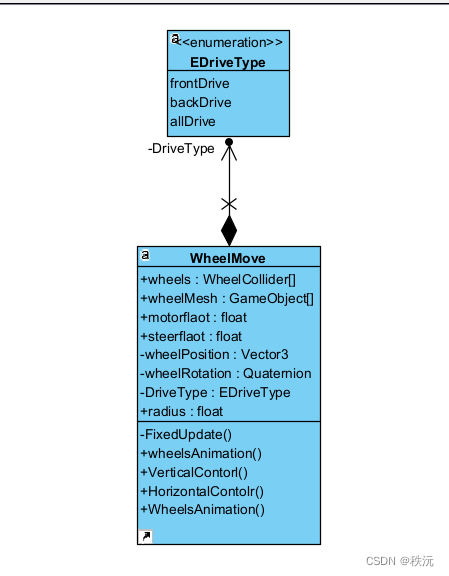
public enum EDriveType
{frontDrive, //前轮驱动backDrive, //后轮驱动allDrive //四驱
}public class WheelMove : MonoBehaviour
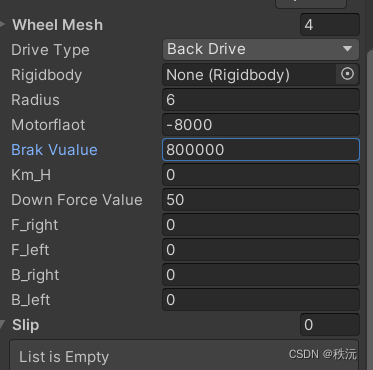
{//-------------------------------------------//四个轮子的碰撞器public WheelCollider[] wheels ;//网格的获取public GameObject[] wheelMesh;//扭矩力度public float motorflaot = 200f;//初始化三维向量和四元数private Vector3 wheelPosition = Vector3.zero;private Quaternion wheelRotation = Quaternion.identity;//-------------------------------------------//驱动模式选择 _默认前驱public EDriveType DriveType = EDriveType.frontDrive;//轮半径public float radius = 0.25f;private void FixedUpdate(){WheelsAnimation(); //车轮动画VerticalContorl(); //驱动管理HorizontalContolr(); //转向管理}//垂直轴方向管理(驱动管理)public void VerticalContorl(){switch (DriveType){case EDriveType.frontDrive: //选择前驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical *(motorflaot / 2); //扭矩马力归半}}break;case EDriveType.backDrive://选择后驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 2; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * (motorflaot / 2); //扭矩马力归半}}break;case EDriveType.allDrive://选择四驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * ( motorflaot / 4 ); //扭矩马力/4}}break;default:break;}}//水平轴方向管理(转向管理)public void HorizontalContolr(){if (InputManager.InputManagerment.horizontal > 0){//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else if (InputManager.InputManagerment.horizontal < 0){wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else{wheels[0].steerAngle = 0;wheels[1].steerAngle = 0;}}//车轮动画相关public void WheelsAnimation(){for (int i = 0; i < wheels.Length ; i++){//获取当前空间的车轮位置 和 角度wheels[i].GetWorldPose(out wheelPosition, out wheelRotation);//赋值给wheelMesh[i].transform.position = wheelPosition;print(wheelRotation);wheelMesh[i].transform.rotation = wheelRotation * Quaternion .AngleAxis (90,Vector3 .forward );}}
}}}
}🎶(B)车辆优化——车身持续稳定的优化
WheelMove脚本 ——> CarMoveControl脚本 更改脚本名
😶🌫️速度属性实时转换
- 每小时多少公里 和 每秒多少米的对应关系 ——1m/s = 3.6km/h
速度属性建议改成Int类型 ,float类型会上下浮动不准确
//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间- 相机测速 m/s
//相机监测实时速度Control = target.GetComponent<CarMoveControl>();speed = (int )Control.Km_H / 4;speed = Mathf.Clamp(0, 55,speed ); //对应最大200公里每小时
- 添加四个轮子的实时速度,对应虚度属性,可以明显的观察四驱和二驱的汽车动力
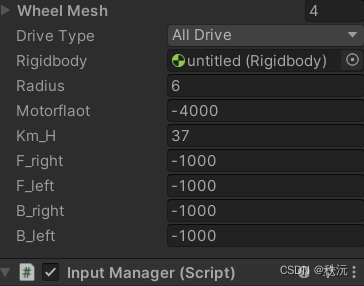
//车辆物理属性相关public void VerticalAttribute(){//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间//显示每个轮胎的扭矩f_right = wheels[0].motorTorque;f_left = wheels[1].motorTorque;b_right = wheels[2].motorTorque;b_left = wheels[3].motorTorque;}
😶🌫️为车子添加下压力
知识百科: 什么是下压力
下压力是车在行进中空气在车体上下流速不一产生的,使空气的总压力指向地面从而增加车的抓地力.
速度越大,下压力越大,抓地更强,越不易翻车

- 关键代码
//-------------下压力添加-----------------//速度越大,下压力越大,抓地更强rigidbody.AddForce(-transform.up * downForceValue * rigidbody.velocity .magnitude );
😶🌫️质心的添加centerMess
知识百科:什么是质心?——质量中心
汽车制造商在设计汽车时会考虑质心的位置和重心高度,以尽可能减小质心侧偏角。 一些高性能汽车甚至会采用主动悬挂系统来控制车身侧倾,从而减小质心侧偏角,提高车辆的稳定性和操控性。
质量中心越贴下,越不容易翻
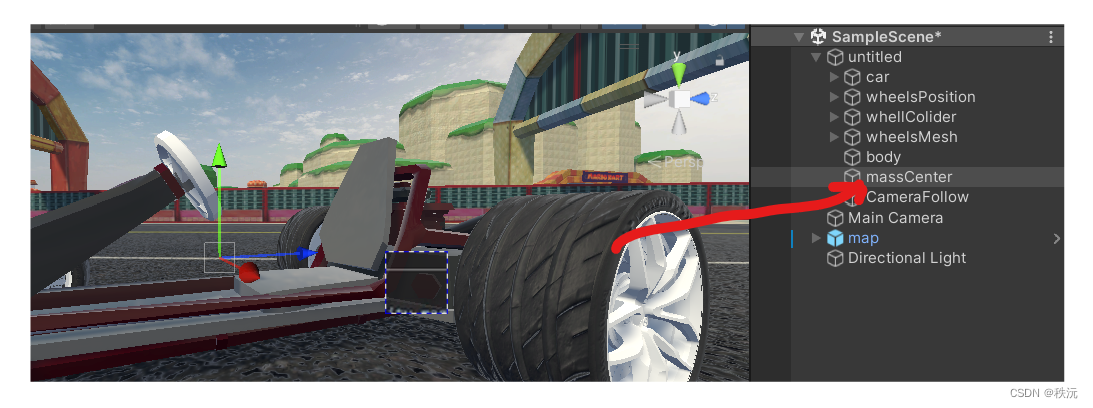
//-------------质量中心同步----------------//质量中心越贴下,越不容易翻rigidbody.centerOfMass = CenterMass;
- 手刹的添加
//手刹管理public void HandbrakControl(){if(InputManager.InputManagerment .handbanl ){ //后轮刹车wheels[2].brakeTorque = brakVualue;wheels[3].brakeTorque = brakVualue;}else{wheels[2].brakeTorque = 0;wheels[3].brakeTorque = 0;}}😶🌫️轮胎的平滑度的显示
wheelhit.forwardSlip;用来观看刹车轮胎在滚动方向上打滑。加速滑移为负,制动滑为正
_______
for (int i = 0; i < slip.Length; i++){WheelHit wheelhit;wheels[i].GetGroundHit(out wheelhit);slip[i] = wheelhit.forwardSlip; //轮胎在滚动方向上打滑。加速滑移为负,制动滑为正}
🎶(C)脚本记录
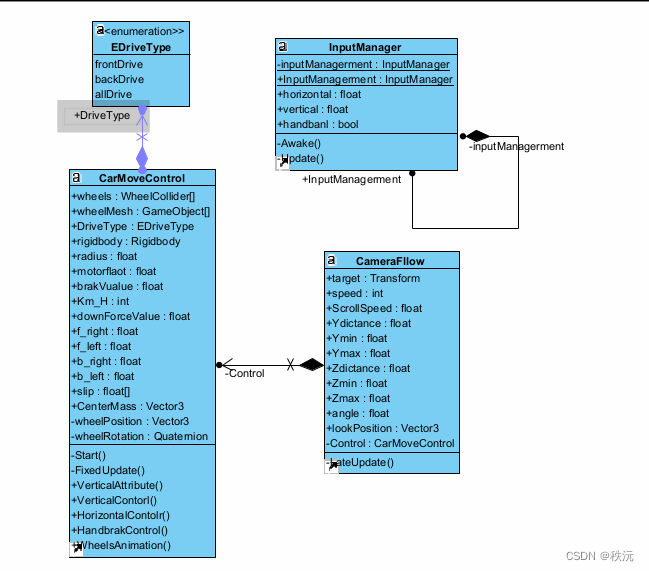
CarMoveContorl
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 车轮的运动
//___________创建者:_______秩沅________
//_____________________________________
//-------------------------------------//驱动模式的选择
public enum EDriveType
{frontDrive, //前轮驱动backDrive, //后轮驱动allDrive //四驱
}public class CarMoveControl : MonoBehaviour
{//-------------------------------------------//四个轮子的碰撞器public WheelCollider[] wheels ;//网格的获取public GameObject[] wheelMesh;//初始化三维向量和四元数private Vector3 wheelPosition = Vector3.zero;private Quaternion wheelRotation = Quaternion.identity;//-------------------------------------------//驱动模式选择 _默认前驱public EDriveType DriveType = EDriveType.frontDrive;//----------车辆属性特征-----------------------//车刚体public Rigidbody rigidbody;//轮半径public float radius = 0.25f;//扭矩力度public float motorflaot = 8000f;//刹车力public float brakVualue = 800000f;//速度:每小时多少公里public int Km_H;//下压力public float downForceValue = 1000f; //四个轮胎扭矩力的大小public float f_right;public float f_left;public float b_right;public float b_left;//车轮打滑参数识别public float[] slip ;//质心public Vector3 CenterMass;//一些属性的初始化private void Start(){rigidbody = GetComponent<Rigidbody>();slip = new float[4];}private void FixedUpdate(){VerticalAttribute();//车辆物理属性管理WheelsAnimation(); //车轮动画VerticalContorl(); //驱动管理HorizontalContolr(); //转向管理HandbrakControl(); //手刹管理}//车辆物理属性相关public void VerticalAttribute(){//---------------速度实时---------------//1m/s = 3.6km/hKm_H =(int)(rigidbody.velocity.magnitude * 3.6) ;Km_H = Mathf.Clamp( Km_H,0, 200 ); //油门速度为 0 到 200 Km/H之间//--------------扭矩力实时---------------//显示每个轮胎的扭矩f_right = wheels[0].motorTorque;f_left = wheels[1].motorTorque;b_right = wheels[2].motorTorque;b_left = wheels[3].motorTorque;//-------------下压力添加-----------------//速度越大,下压力越大,抓地更强rigidbody.AddForce(-transform.up * downForceValue * rigidbody.velocity .magnitude );//-------------质量中心同步----------------//质量中心越贴下,越不容易翻rigidbody.centerOfMass = CenterMass;}//垂直轴方向运动管理(驱动管理)public void VerticalContorl(){switch (DriveType){case EDriveType.frontDrive: //选择前驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical *(motorflaot / 2); //扭矩马力归半}}else{for (int i = 0; i < wheels.Length - 2; i++){//扭矩力度wheels[i].motorTorque = 0; }}break;case EDriveType.backDrive://选择后驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 2; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * (motorflaot / 2); //扭矩马力归半}}else{for (int i = 2; i < wheels.Length ; i++){//扭矩力度wheels[i].motorTorque = 0;}}break;case EDriveType.allDrive://选择四驱if (InputManager.InputManagerment.vertical != 0) //当按下WS键时生效{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = InputManager.InputManagerment.vertical * ( motorflaot / 4 ); //扭矩马力/4}}else{for (int i = 0; i < wheels.Length; i++){//扭矩力度wheels[i].motorTorque = 0;}}break;default:break;}}//水平轴方向运动管理(转向管理)public void HorizontalContolr(){if (InputManager.InputManagerment.horizontal > 0){//后轮距尺寸设置为1.5f ,轴距设置为2.55f ,radius 默认为6,radius 越大旋转的角度看起来越小wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else if (InputManager.InputManagerment.horizontal < 0){wheels[0].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius - (1.5f / 2))) * InputManager.InputManagerment.horizontal;wheels[1].steerAngle = Mathf.Rad2Deg * Mathf.Atan(2.55f / (radius + (1.5f / 2))) * InputManager.InputManagerment.horizontal;}else{wheels[0].steerAngle = 0;wheels[1].steerAngle = 0;}}//手刹管理public void HandbrakControl(){if(InputManager.InputManagerment .handbanl ){//后轮刹车wheels[2].brakeTorque = brakVualue;wheels[3].brakeTorque = brakVualue;}else{wheels[2].brakeTorque = 0;wheels[3].brakeTorque = 0;}//------------刹车效果平滑度显示------------for (int i = 0; i < slip.Length; i++){WheelHit wheelhit;wheels[i].GetGroundHit(out wheelhit);slip[i] = wheelhit.forwardSlip; //轮胎在滚动方向上打滑。加速滑移为负,制动滑为正}}//车轮动画相关public void WheelsAnimation(){for (int i = 0; i < wheels.Length ; i++){//获取当前空间的车轮位置 和 角度wheels[i].GetWorldPose(out wheelPosition, out wheelRotation);//赋值给wheelMesh[i].transform.position = wheelPosition;wheelMesh[i].transform.rotation = wheelRotation * Quaternion .AngleAxis (90,Vector3 .forward );}}
}CameraFllow
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 相机的跟随
//___________创建者:秩沅_______________
//_____________________________________
//-------------------------------------
public class CameraFllow : MonoBehaviour
{//目标物体public Transform target;private CarMoveControl Control;public int speed;//鼠标滑轮的速度public float ScrollSpeed = 45f;//Y轴差距参数public float Ydictance = 0f; public float Ymin = 0f;public float Ymax = 4f;//Z轴差距参数public float Zdictance = 4f;public float Zmin = 4f;public float Zmax = 8f;//相机看向的角度 和最終位置public float angle = -25 ;public Vector3 lookPosition;void LateUpdate(){//Z轴和Y轴的距离和鼠标滑轮联系Ydictance += Input.GetAxis("Mouse ScrollWheel") * ScrollSpeed * Time.deltaTime;//平滑效果Zdictance += Input.GetAxis("Mouse ScrollWheel") * ScrollSpeed * Time.deltaTime;//設置Y軸和x轴的滚轮滑动范围 Ydictance = Mathf.Clamp(Ydictance , Ymin ,Ymax ) ; Zdictance = Mathf.Clamp(Zdictance , Zmin, Zmax ) ;//确定好角度,四元数 * 三维向量 = 三维向量lookPosition = Quaternion.AngleAxis(angle, target .right) * -target.forward ;//更新位置transform.position = target.position + Vector3.up * Ydictance - lookPosition * Zdictance ;//更新角度transform.rotation = Quaternion.LookRotation(lookPosition);//实时速度Control = target.GetComponent<CarMoveControl>();speed = (int )Control.Km_H / 4;speed = Mathf.Clamp(speed,0, 55 ); //对应最大200公里每小时}
}InputMana
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
//-------------------------------------
//—————————————————————————————————————
//___________项目: ______________
//___________功能: 输入控制管理器
//___________创建者:秩沅_______________
//_____________________________________
//-------------------------------------
public class InputManager : MonoBehaviour
{//单例模式管理static private InputManager inputManagerment;static public InputManager InputManagerment => inputManagerment;public float horizontal; //水平方向动力值public float vertical; //垂直方向动力值public bool handbanl; //手刹动力值void Awake(){inputManagerment = this;}void Update(){//与Unity中输入管理器的值相互对应horizontal = Input.GetAxis("Horizontal");vertical = Input.GetAxis("Vertical");handbanl = Input.GetAxis("Jump")!= 0 ? true :false ; //按下空格键时就是1,否则为0}
}⭐🅰️⭐
⭐【Unityc#专题篇】之c#进阶篇】
⭐【Unityc#专题篇】之c#核心篇】
⭐【Unityc#专题篇】之c#基础篇】
⭐【Unity-c#专题篇】之c#入门篇】
⭐【Unityc#专题篇】—进阶章题单实践练习
⭐【Unityc#专题篇】—基础章题单实践练习
⭐【Unityc#专题篇】—核心章题单实践练习
你们的点赞👍 收藏⭐ 留言📝 关注✅是我持续创作,输出优质内容的最大动力!、

这篇关于【Unity3D赛车游戏】【四】在Unity中添加阿克曼转向,下压力,质心会让汽车更稳定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







