本文主要是介绍用opencv的traincascade.exe训练行人的HAAR、LBP和HOG特征的xml文件,并对分类器进行加载和检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
看到一篇论文上讲到可以用adaboost分类器进行行人检测,就想自己动手训练一下分类器,折腾了两周终于训练成功了。。。
opencv中有两个函数可以训练分类器opencv_haartraining.exe和opencv_traincascade.exe,前者只能训练haar特征,后者可以用HAAR、LBP和HOG特征训练分类器。这两个函数都可以在opencv\build\x86\vc10\bin文件夹下找到,opencv_haartraining.exe训练的adaboost级联分类器有很多了,本文主要讲opencv_haartraining.exe训练的LBP和HOG特征的分类器。
训练的过程包过四步:
首先是样本的准备、其次是对样本进行处理、再次生成样本描述文件、最后一步是训练分类器。
1、样本的准备
以行人训练为例,首先正样本是各种各样的行人的照片,负样本就是非人照片。样本个数最好在上千个,个数太少训练出来的分类器不能准确的检测行人,网上对正负样本的个数比例不尽相同,有的说3:1有的说7:3,具体的还是要自己去实验,我用的正样本有2000个负样本1200个。把正负样本分别放在不同的文件夹下,可以命名为pos、neg。同时也要把opencv自带的训练函数和正负样本一起放到一个文件夹下,例如放到E盘的boost文件夹下。如图
ps:对正负样本的几点说明。。。
正负样本都要转化成灰度图,而且对于正样本用haar特征训练是规格化成20*20或其他大小,最好不要太大,过多的haar特征会影响分类器的训练时间;对于LBP特征正样本要规格化为24*24大小,而对于HOG要规格化成64*64. 负样本对尺寸没有统一要求,在训练对应的分类器时,选择的负样本尺寸一定要大于等于正样本规定的尺寸。 a,正样本就是人的图片就行了,尽量包含少的背景。 b,负样本有两点要求:一,不能包含正样本且尽可能多的提供场景的背景图;二,负样本尽可能的多,而且要多样化,和正样本有一定的差距但是差别也不要太大,否则容易在第一级就全部被分类器reject,训练时不能显示负样本的个数,从而导致卡死。
2、对样本进行处理
以下的处理过程都是在命令行下进行的,在计算机【开始】里面输入“cmd”就可以进入命令行了。。。。。。
然后进入你刚才新建的包含以上样本的文件夹下 首先进入E盘 直接输入E:就可以了,其次输入“cd boost”就可以进入刚才的文件夹下。输入“CD..”可以返回上一程
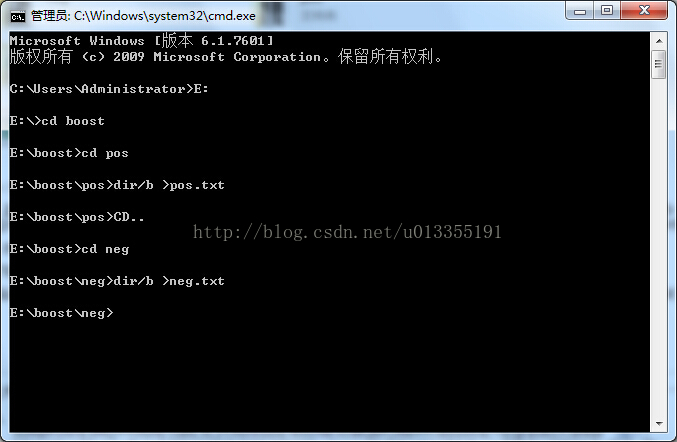
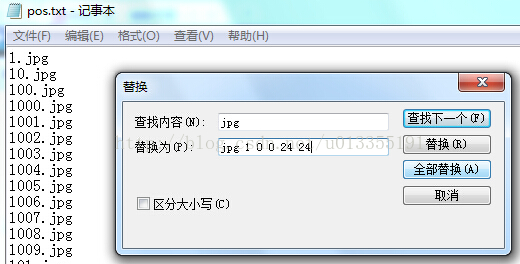
输入dir /b >pos.txt 可以在pos文件夹下生成正样本描述文件,文件是txt文件,包含的内容是正样本中图片的对应序号和格式。把其中的格式jpg改成jpg 1 0 0 24 24
3、生成样本描述文件
对正负样本进行以上预处理之后,就可以创建正样本vec文件了。
命令行进入opencv_createsamples.exe文件夹下,依次输入:opencv_createsamples.exe -info pos\pos.txt -vec pos.vec -bg neg\neg.txt -num 2000 -w 24 -h 24 回车之后文件夹下就会出现pos.vec文件。
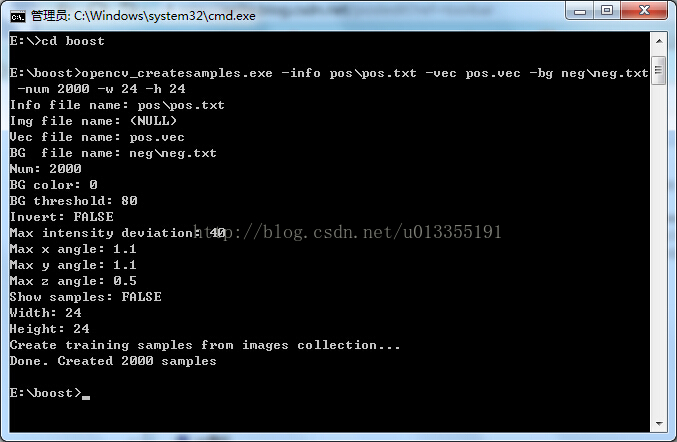
以上参数的含义如下:
-vec <vec_file_name>:训练好的正样本的输出文件名。
-img<image_file_name>:源目标图片(例如:一个公司图标)
-bg<background_file_name>:背景描述文件。
-num<number_of_samples>:要产生的正样本的数量,和正样本图片数目相同。
-bgcolor<background_color>:背景色(假定当前图片为灰度图)。背景色制定了透明色。对于压缩图片,颜色方差量由bgthresh参数来指定。则在bgcolor-bgthresh 和bgcolor+bgthresh 中间的像素被认为是透明的。
-bgthresh<background_color_threshold>
-inv:如果指定,颜色会反色
-randinv:如果指定,颜色会任意反色
-maxidev<max_intensity_deviation>:背景色最大的偏离度。
-maxangel<max_x_rotation_angle>,
-maxangle<max_y_rotation_angle>,
-maxzangle<max_x_rotation_angle>:最大旋转角度,以弧度为单位。
-show:如果指定,每个样本会被显示出来,按下"esc"会关闭这一开关,即不显示样本图片,而创建过程
继续。这是个有用的debug 选项。
-w<sample_width>:输出样本的宽度(以像素为单位)
-h<sample_height>:输出样本的高度(以像素为单位)
4、训练分类器
在以上准备工作都做好的情况下,就可以进行训练分类器了。
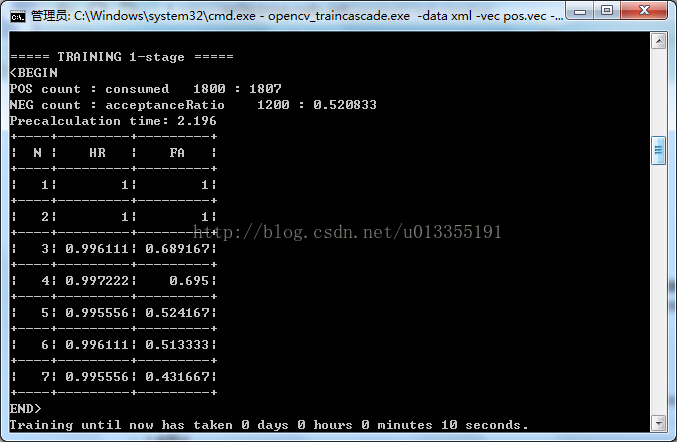
在cmd命令行下输入:opencv_traincascade.exe -data xml -vec pos.vec -bg neg\neg.txt -numpos 1800 -numneg 1200 -numstages 20 -featureType LBP -w 24 -h 24
按enter就可以进入训练阶段了。
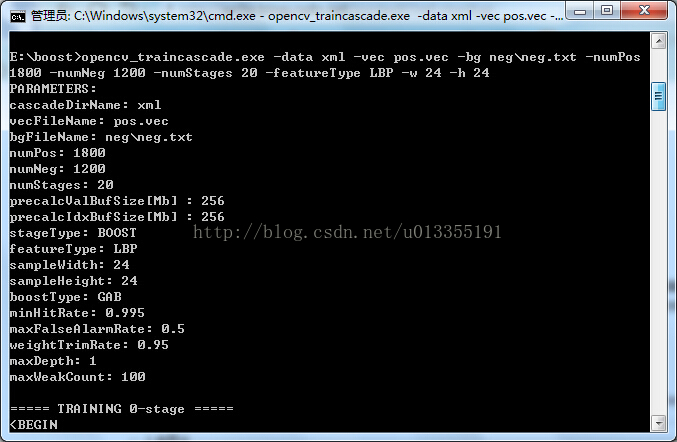
opencv_traincascade.exe的命令行参数解释如下:
通用参数:
-data <cascade_dir_name>:目录用于保存训练产生的分类器xml文件和中间文件(对于上面的LBP_classifier),如不存在训练程序会创建它;
-vec <vec_file_name>:由 opencv_createsamples 程序生成的包含正样本的vec文件名(对应上面的pos_24_24.vec);
-bg <background_file_name>:背景描述文件,也就是包含负样本文件名的那个描述文件(对应上面的neg\neg.txt);
-numPos <number_of_positive_samples>:每级分类器训练时所用的正样本数目(默认值为2000);
-numNeg <number_of_negative_samples>:每级分类器训练时所用的负样本数目,可以大于 -bg 指定的图片数目(默认值为1000);
-numStages <number_of_stages>:训练的分类器的级数(默认值为20级);
-precalcValBufSize <precalculated_vals_buffer_size_in_Mb>:缓存大小,用于存储预先计算的特征值(feature values),单位为MB(默认值为256);
-precalcIdxBufSize <precalculated_idxs_buffer_size_in_Mb>:缓存大小,用于存储预先计算的特征索引(feature indices),单位为MB(默认值为256);
内存越大,训练时间越短。
-baseFormatSave:这个参数仅在使用Haar特征时有效。如果指定这个参数,那么级联分类器将以老的格式存储(默认不指定该参数项,此时其值为false;一旦指定则其值默认为true);
级联参数:CvCascadeParams类,定义于cascadeclassifier.h
-stageType <BOOST(default)>:级别(stage)参数。目前只支持将BOOST分类器作为级联的类型;
-featureType<{HAAR(default), LBP}>:特征的类型: HAAR - 类Haar特征; LBP - 局部纹理模式特征(默认Harr);
-w <sampleWidth>:训练样本的宽(单位为像素,默认24);
-h <sampleHeight>:训练样本的高(单位为像素,默认24);
训练样本的尺寸必须跟训练样本创建(使用 opencv_createsamples 程序创建)时的尺寸保持一致。
Boosted分类器参数:CvCascadeBoostParams类,定义于boost.h
-bt <{DAB, RAB, LB, GAB(default)}>:Boosted分类器的类型(DAB - Discrete AdaBoost, RAB - Real AdaBoost, LB - LogitBoost, GAB - Gentle AdaBoost为默认);
-minHitRate <min_hit_rate>:分类器的每一级希望得到的最小检测率(默认值为0.995),总的检测率大约为 min_hit_rate^number_of_stages;
-maxFalseAlarmRate <max_false_alarm_rate>:分类器的每一级希望得到的最大误检率(默认值为0.5),总的误检率大约为 max_false_alarm_rate^number_of_stages;
-weightTrimRate <weight_trim_rate>:Specifies whether trimming should be used and its weight,一个还不错的数值是0.95;
-maxDepth <max_depth_of_weak_tree>:弱分类器树最大的深度。一个还不错的数值是1,是二叉树(stumps);
-maxWeakCount <max_weak_tree_count>:每一级中的弱分类器的最大数目(默认值为100)。The boosted classifier (stage) will have so many weak trees (<=maxWeakCount), as needed to achieve the given -maxFalseAlarmRate;
等到分类器训练到你自己设定的级数 就完成了。最后得到的cascad.xml就是我们需要的结果。
好了,到这里自己的分类器就训练完成了,下面就可以用得到的xml文件进行检测了。
这篇关于用opencv的traincascade.exe训练行人的HAAR、LBP和HOG特征的xml文件,并对分类器进行加载和检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



