本文主要是介绍图深度优先搜索广度优先搜索,邻接表,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
#include <stdafx.h>#include"iostream"#include"malloc.h"using namespace std;#define MaxVertexNum 50 //定义最大顶点数typedef struct node{ //边表结点char adjvex; //邻接点域struct node *next; //链域}EdgeNode;typedef struct vnode{ //顶点表结点char vertex; //顶点域EdgeNode *firstedge; //边表头指针}VertexNode;typedef VertexNode AdjList[MaxVertexNum]; //AdjList是邻接表类型typedef struct {AdjList adjlist; //邻接表int n,e; //图中当前顶点数和边数} ALGraph; //图类型// 建立图的邻接表 void CreatALGraph(ALGraph *G){int i,j,k;char a;EdgeNode *s; //定义边表结点cout<<"请输入顶点数和边数: ";cin>>i;cin>>j; //读入顶点数和边数G->n=i;G->e=j;cout<<"请输入顶点编号:";for(i=0;i<G->n;i++) //建立边表{cin>>a;G->adjlist[i].vertex=a; //读入顶点信息G->adjlist[i].firstedge=NULL; //边表置为空表}cout<<"请输入由两个顶点构成的边,示例:0 1"<<endl;for(k=0;k<G->e;k++){ //建立边表cin>>i;cin>>j; //读入边(Vi,Vj)的顶点对序号s=(EdgeNode *)malloc(sizeof(EdgeNode)); //生成边表结点s->adjvex=j; //邻接点序号为js->next=G->adjlist[i].firstedge;G->adjlist[i].firstedge=s; //将新结点*S插入顶点Vi的边表头部s=(EdgeNode *)malloc(sizeof(EdgeNode));s->adjvex=i; //邻接点序号为is->next=G->adjlist[j].firstedge; G->adjlist[j].firstedge=s; //将新结点*S插入顶点Vj的边表头部}}//定义标志向量为全局变量 typedef enum{FALSE,TRUE} Boolean;Boolean visited[MaxVertexNum];// DFS:深度优先遍历的递归算法 void DFSM(ALGraph *G,int i){ //以Vi为出发点对邻接链表表示的图G进行DFS搜索EdgeNode *p;cout<<G->adjlist[i].vertex; //访问顶点Vivisited[i]=TRUE; //标记Vi已访问p=G->adjlist[i].firstedge; //取Vi边表的头指针while(p) { //依次搜索Vi的邻接点Vj,这里j=p->adjvexif(! visited[p->adjvex]) //若Vj尚未被访问DFSM(G,p->adjvex); //则以Vj为出发点向纵深搜索p=p->next; //找Vi的下一个邻接点}}void DFS(ALGraph *G){for(int i=0;i<G->n;i++)visited[0]=FALSE; //标志向量初始化for(int i=0;i<G->n;i++)if(!visited[0]) //Vi未访问过DFSM(G,0); //以Vi为源点开始DFS搜索}//广度优先遍历 void BFS(ALGraph *G){ int k=0; /*以Vk为源点对用邻接链表表示的图G进行广度优先搜索*/int i,f=0,r=0;EdgeNode *p;int cq[MaxVertexNum]; //定义FIFO队列for(i=0;i<G->n;i++)visited[i]=FALSE; //标志向量初始化for(i=0;i<=G->n;i++)cq[i]=-1; //初始化标志向量cout<<G->adjlist[k].vertex; //访问源点Vkvisited[k]=TRUE;cq[r]=k; //Vk已访问,将其入队。注意,实际上是将其序号入队while(cq[f]!=-1) { //队列非空则执行i=cq[f]; f=f+1; //Vi出队p=G->adjlist[i].firstedge; //取Vi的边表头指针while(p) { //依次搜索Vi的邻接点Vj(令p->adjvex=j)if(!visited[p->adjvex]) { //若Vj未访问过cout<<G->adjlist[p->adjvex].vertex; //访问Vjvisited[p->adjvex]=TRUE;r=r+1; cq[r]=p->adjvex; //访问过的Vj入队}p=p->next; //找Vi的下一个邻接点}} } int main(){int i,x;ALGraph *G;G=(ALGraph *)malloc(sizeof(ALGraph));CreatALGraph(G);cout<<"遍历结果与构造边的顺序有关。"<<endl;cout<<"深度优先 "<<endl;DFS(G);cout<<endl;cout<<"广度优先"<<endl;BFS(G);cout<<endl;}图的遍历(Traversing Graph)是指从图中某一顶点出发访问图中其余顶点,且使每个顶点仅被访问一次。
广度优先搜索(Breadth First Search)
广度优先搜索假设从图中某个顶点v出发,在访问了v之后依次访问v的各个未曾访问过的邻接点,然后再分别从这些邻接点出发依次访问它们的邻接点,并使先被访问的顶点的邻接点先于后被访问的顶点的邻接点被访问(因此需要用队列来存储顶点),直到图中所有已被访问的顶点的邻接点都被访问为止。如果此时图中还有未被访问的顶点,则另选图中未被访问的顶点作为起点,重复上述过程,直到图中所有顶点都被访问为止。
采用邻接表存储图的具体实现如下:
- #include <iostream>
- #include <queue>
- #include <cstdio>
- #include <cstdlib>
- using namespace std;
- #define VERTEXNUM 100 //顶点个数
- typedef char VertexType;
- typedef int EdgeType;
- typedef enum{FALSE, TRUE} Boolean;
- Boolean visited[VERTEXNUM];
- /***************************************
- *
- * 邻接表存储结构
- *
- * *************************************/
- typedef struct node
- {
- int adjvex; //顶点位置
- struct node *next; //指向下一条边的指针
- }EdgeNode;
- typedef struct vnode
- {
- VertexType vertex; //顶点信息
- EdgeNode *firstedge; //指向第一条依附该顶点的边的指针
- }AdjList[VERTEXNUM];
- typedef struct
- {
- AdjList vertexs; //邻接表
- int vernum, edgenum; //图中当前的顶点和边数
- }Graph;
- /***************************************
- *
- * 建立图的邻接表
- *
- * *************************************/
- void MakeGraph(Graph *graph)
- {
- int v1, v2;
- int i, j, k;
- printf("请输入图的顶点数n和边数e:\n");
- scanf("%d%d", &graph->vernum, &graph->edgenum);
- printf("请输入顶点信息(顶点号<CR>)每个顶点以回车作为结束:\n");
- for(i = 0; i < graph->vernum; i++)
- {
- getchar();
- scanf("%c", &graph->vertexs[i].vertex);
- graph->vertexs[i].firstedge = NULL; //初始第一条边为空
- }
- printf("请输入每条边对应的两个顶点的序号(格式为i,j):\n");
- EdgeNode *p;
- for(k = 0; k < graph->edgenum; k++)
- {
- scanf("%d,%d", &i, &j); //读入边<vi,vj>的序号
- p = (node *)malloc(sizeof(node)); //生成新的结点
- p->adjvex = j - 1;
- p->next = graph->vertexs[i - 1].firstedge;
- graph->vertexs[i - 1].firstedge = p;
- }
- }
- /***************************************
- *
- * 广度优先遍历
- *
- * *************************************/
- void BFS(Graph *graph)
- {
- int i, j, k;
- queue<int> q;
- EdgeNode *p;
- for(i = 0; i < graph->vernum; i++) //初始化访问标识数组
- visited[i] = FALSE;
- for(i = 0; i < graph->vernum; i++)
- {
- if(!visited[i])
- {
- visited[i] = TRUE;
- printf("广度优先遍历:结点%c\n", graph->vertexs[i].vertex);
- q.push(i); //入栈
- while(!q.empty())
- {
- j = q.front();
- q.pop(); //出栈
- p = graph->vertexs[j].firstedge;
- while(p)
- {
- if(!visited[p->adjvex])
- {
- printf("广度优先遍历:结点%c\n", graph->vertexs[p->adjvex].vertex);
- visited[p->adjvex] = TRUE;
- q.push(p->adjvex);
- }
- p = p->next;
- }
- }
- }
- }
- }
- int main()
- {
- Graph *graph = (Graph *)malloc(sizeof(Graph));
- MakeGraph(graph); //建立图的邻接表
- BFS(graph); //广度优先遍历
- return 0;
- }
图一中的图,运行上述程序得到的结果如图二。
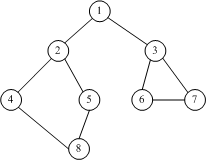 图一
图一

图二
这篇关于图深度优先搜索广度优先搜索,邻接表的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



